diff --git a/.github/workflows/deploy.yml b/.github/workflows/deploy.yml
index dcc639e..ab19eb7 100644
--- a/.github/workflows/deploy.yml
+++ b/.github/workflows/deploy.yml
@@ -25,5 +25,5 @@ jobs:
accessKeyId: ${{ secrets.ACCESS_KEY_ID }}
accessKeySecret: ${{ secrets.ACCESS_KEY_SECRET }}
bucket: "blog-meteoroid-fit"
- endpoint: "oss-cn-beijing.aliyuncs.com"
+ endpoint: "oss-cn-beijing.aliyuncs.com"
folder: "docs/.vitepress/dist"
diff --git a/.vscode/settings.json b/.vscode/settings.json
index 0c92343..347a7f2 100644
--- a/.vscode/settings.json
+++ b/.vscode/settings.json
@@ -1,3 +1,3 @@
{
- "liveServer.settings.port": 5518
-}
\ No newline at end of file
+ "liveServer.settings.port": 5518
+}
diff --git a/docs/.vitepress/config.js b/docs/.vitepress/config.js
index 77da5c5..b52c4a9 100644
--- a/docs/.vitepress/config.js
+++ b/docs/.vitepress/config.js
@@ -1,71 +1,78 @@
-import footnote from 'markdown-it-footnote'
-import { defineConfig } from 'vitepress'
+import footnote from "markdown-it-footnote";
+import { defineConfig } from "vitepress";
export default {
- title: 'meteoroid.fit',
- description: 'Just playing around.',
- themeConfig: {
- logo: '/icon.png',
- nav: [
- { text: '模拟器', link: 'http://demo.meteoroid.fit/coverage.html' },
- { text: '全景图', link: 'http://demo.meteoroid.fit/pano/album.html' },
- { text: '文档源码', link: 'https://github.com/quan787/blog_meteoroid_fit' }
+ title: "meteoroid.fit",
+ description: "Just playing around.",
+ themeConfig: {
+ logo: "/icon.png",
+ nav: [
+ { text: "模拟器", link: "http://demo.meteoroid.fit/coverage.html" },
+ { text: "全景图", link: "http://demo.meteoroid.fit/pano/album.html" },
+ {
+ text: "文档源码",
+ link: "https://github.com/quan787/blog_meteoroid_fit",
+ },
+ ],
+ sidebar: [
+ {
+ items: [
+ {
+ text: "文档中心",
+ link: "/preface",
+ },
],
- sidebar: [
- {
- items: [{
- text: '文档中心',
- link: '/preface'
- }]
- },
- {
- text: '流星探测理论',
- items: [
- { text: '前言', link: '/meteor/motivation' },
- { text: '流星探测原理(1)', link: '/meteor/concepts' },
- { text: '流星探测原理(2)', link: '/meteor/concepts2' },
- { text: '世界上的流星监测网', link: '/meteor/networks' },
- { text: '澳大利亚沙漠火流星监测网', link: '/meteor/DFN' },
- { text: '光子到电子到数字', link: '/meteor/photon_to_digit' },
- { text: '网络摄像头的错误设置', link: '/meteor/wrong_settings' },
- { text: '如何拍到更多流星?', link: '/meteor/camera' }
- ]
- },
- {
- text: '从零到一搭建流星监控设备',
- items: [
- { text: '主要构成', link: '/hardware/howto' },
- { text: '相机部分', link: '/hardware/camera' },
- { text: '电脑部分', link: '/hardware/computer' },
- { text: '支架和安装', link: '/hardware/casing' }
- ]
- },
- {
- text: 'meteoroid.fit网站',
- items: [
- /*{ text: '注册', link: 'website/register' }*/
- ]
- },
+ },
+ {
+ text: "流星探测理论",
+ items: [
+ { text: "前言", link: "/meteor/motivation" },
+ { text: "流星探测原理(1)", link: "/meteor/concepts" },
+ { text: "流星探测原理(2)", link: "/meteor/concepts2" },
+ { text: "世界上的流星监测网", link: "/meteor/networks" },
+ { text: "澳大利亚沙漠火流星监测网", link: "/meteor/DFN" },
+ { text: "光子到电子到数字", link: "/meteor/photon_to_digit" },
+ { text: "网络摄像头的错误设置", link: "/meteor/wrong_settings" },
+ { text: "如何拍到更多流星?", link: "/meteor/camera" },
+ ],
+ },
+ {
+ text: "从零到一搭建流星监控设备",
+ items: [
+ { text: "主要构成", link: "/hardware/howto" },
+ { text: "相机部分", link: "/hardware/camera" },
+ { text: "电脑部分", link: "/hardware/computer" },
+ { text: "支架和安装", link: "/hardware/casing" },
+ ],
+ },
+ {
+ text: "meteoroid.fit网站",
+ items: [
+ /*{ text: '注册', link: 'website/register' }*/
+ ],
+ },
- {
- items: [{
- text: '首页',
- link: '/index'
- },
- {
- text: '京ICP备19031740号-2',
- link: 'https://beian.miit.gov.cn/'
- }]
- }
+ {
+ items: [
+ {
+ text: "首页",
+ link: "/index",
+ },
+ {
+ text: "京ICP备19031740号-2",
+ link: "https://beian.miit.gov.cn/",
+ },
],
- footer: {
- message: '京ICP备19031740号-2',
- copyright: 'Copyright © 2022-present quan787'
- }
+ },
+ ],
+ footer: {
+ message: '京ICP备19031740号-2',
+ copyright: "Copyright © 2022-present quan787",
},
- markdown: {
- config: (md) => {
- md.use(footnote)
- }
- }
-}
+ },
+ markdown: {
+ config: (md) => {
+ md.use(footnote);
+ },
+ },
+};
diff --git a/docs/.vitepress/theme/custom.css b/docs/.vitepress/theme/custom.css
index 9888d57..173c5f6 100644
--- a/docs/.vitepress/theme/custom.css
+++ b/docs/.vitepress/theme/custom.css
@@ -1,4 +1,4 @@
:root {
- --vp-c-brand: #715bca;
- --vp-c-brand-light: #A096C8;
-}
\ No newline at end of file
+ --vp-c-brand: #715bca;
+ --vp-c-brand-light: #a096c8;
+}
diff --git a/docs/.vitepress/theme/index.js b/docs/.vitepress/theme/index.js
index 508d8b4..c495bc1 100644
--- a/docs/.vitepress/theme/index.js
+++ b/docs/.vitepress/theme/index.js
@@ -1,4 +1,4 @@
-import DefaultTheme from 'vitepress/theme'
-import './custom.css'
+import DefaultTheme from "vitepress/theme";
+import "./custom.css";
-export default DefaultTheme
\ No newline at end of file
+export default DefaultTheme;
diff --git a/docs/hardware/camera.md b/docs/hardware/camera.md
index 2b0e77a..1e496d9 100644
--- a/docs/hardware/camera.md
+++ b/docs/hardware/camera.md
@@ -2,20 +2,20 @@
相机部分其实就一个关注点:防水。主要的工作量就是把相机装在防水壳里,再把防水壳固定在支架上。成品的网络摄像头是最简单的,但是天文相机需要自己组装。
-现在市面上的监控产品,无论是相机与防水壳,还是防水壳与支架的安装,主要都采用英制的1/4螺丝。防水壳中配一个底板,将相机安装在这个底板上,再把底板安装在防水壳里,就完成了。1/4螺丝其实就是摄影三脚架用的螺丝,所以监控防水壳可以很方便地装在三脚架上,如果你愿意,也可以把海康威视的摄像头装在星野赤道仪上,虽然没有这个必要。
+现在市面上的监控产品,无论是相机与防水壳,还是防水壳与支架的安装,主要都采用英制的 1/4 螺丝。防水壳中配一个底板,将相机安装在这个底板上,再把底板安装在防水壳里,就完成了。1/4 螺丝其实就是摄影三脚架用的螺丝,所以监控防水壳可以很方便地装在三脚架上,如果你愿意,也可以把海康威视的摄像头装在星野赤道仪上,虽然没有这个必要。
-使用QHY或ZWO等品牌的天文相机时需要自行组装。除了相机之外,还需要单独购买镜头。其实最适合的镜头也是来自于安防行业,它们价格便宜,使用的是CS接口,各项参数与天文相机也是适配的。关于如何选择最合适的镜头,请看[这篇文章](../meteor/camera.md)。
+使用 QHY 或 ZWO 等品牌的天文相机时需要自行组装。除了相机之外,还需要单独购买镜头。其实最适合的镜头也是来自于安防行业,它们价格便宜,使用的是 CS 接口,各项参数与天文相机也是适配的。关于如何选择最合适的镜头,请看[这篇文章](../meteor/camera.md)。
## QHY
-QHYCCD的相机在外形上主要分两种,形状与目镜相似的非制冷相机和比较粗大的制冷相机。两者都可以安装CS接口的镜头。
+QHYCCD 的相机在外形上主要分两种,形状与目镜相似的非制冷相机和比较粗大的制冷相机。两者都可以安装 CS 接口的镜头。
-1.25寸直径的非制冷相机自带CS接口的螺纹,所以市售的监控镜头可以直接安装在上面。将圆形的相机安装在防水壳中,需要一个导星镜抱箍。
+1.25 寸直径的非制冷相机自带 CS 接口的螺纹,所以市售的监控镜头可以直接安装在上面。将圆形的相机安装在防水壳中,需要一个导星镜抱箍。

-
+
-而制冷相机安装镜头,需要一个特殊的配件,在购买时需要向卖家索要。拆下相机前的两寸接口,再装上对应接环,就可以安装CS接口的镜头了。防水壳方面,近期出货的QHY制冷相机会附带一个“热承”,可以安装在相机的底部,提供一个1/4螺丝孔。有了这个配件,就很方便将相机安装在防水壳里了。
+而制冷相机安装镜头,需要一个特殊的配件,在购买时需要向卖家索要。拆下相机前的两寸接口,再装上对应接环,就可以安装 CS 接口的镜头了。防水壳方面,近期出货的 QHY 制冷相机会附带一个“热承”,可以安装在相机的底部,提供一个 1/4 螺丝孔。有了这个配件,就很方便将相机安装在防水壳里了。
| | |
| ----------------------------- | ----------------------------- |
@@ -24,22 +24,22 @@ QHYCCD的相机在外形上主要分两种,形状与目镜相似的非制冷
对生产日期较早的相机来说,可以选择用六点式导星镜抱箍固定相机,或者直接用热熔胶将相机粘在底板上(不推荐)。总体来说,制冷式相机由于外形比较大,需要更大的防水壳。

-
+
## ZWO
-ZWO相机大同小异,也需要对应的零件来适配监控镜头的CS接口。值得注意的是,ZWO的非制冷相机形状是圆饼形,1/4螺丝孔在背面而不是底部,需要一个L形快装板转接,或者同样使用三点式或六点式抱箍。
+ZWO 相机大同小异,也需要对应的零件来适配监控镜头的 CS 接口。值得注意的是,ZWO 的非制冷相机形状是圆饼形,1/4 螺丝孔在背面而不是底部,需要一个 L 形快装板转接,或者同样使用三点式或六点式抱箍。
| | |
| ----------------------------- | ----------------------------- |
|  |  |
-另外,相机的USB接口位于相机侧面,这个位置也会影响到相机的安装,因此需要选购折角的USB线,买的时候注意折角的方向。下弯的USB3.0线很难找到,所以退而求其次选择左弯或右弯的。
+另外,相机的 USB 接口位于相机侧面,这个位置也会影响到相机的安装,因此需要选购折角的 USB 线,买的时候注意折角的方向。下弯的 USB3.0 线很难找到,所以退而求其次选择左弯或右弯的。
这两个因素都会导致组装好的相机整体直径很大,因此有必要准备足够大的防水罩。
## 监控相机
-监控相机的安装是最简便的。摄像头基本都自带1/4螺丝孔位和CS镜头接口,对应组装在一起就好。如果是一体式的室外摄像头,则组装镜头这一步也可以省略了,直接将相机安装在支架上即可。
+监控相机的安装是最简便的。摄像头基本都自带 1/4 螺丝孔位和 CS 镜头接口,对应组装在一起就好。如果是一体式的室外摄像头,则组装镜头这一步也可以省略了,直接将相机安装在支架上即可。
-
+
diff --git a/docs/hardware/computer.md b/docs/hardware/computer.md
index ee8cfe8..9a338c1 100644
--- a/docs/hardware/computer.md
+++ b/docs/hardware/computer.md
@@ -2,17 +2,17 @@
## 硬件配置
-我们的软件编译目标为x86架构64位Windows系统。未来如果需要,也会提供Linux系统或arm架构的支持。
+我们的软件编译目标为 x86 架构 64 位 Windows 系统。未来如果需要,也会提供 Linux 系统或 arm 架构的支持。
首先是要确定电脑的类型。如果电脑安装在室内,那么完全可以将闲置的旧电脑利用起来。如果在室外,就需要选择外形较小的“工控机”、“迷你主机”。
-
+
-流星监测程序一般对显卡没有要求,因此只需选择CPU算力足够的型号即可。可以在各种“CPU天梯”网站(例如[这个网站](https://www.cpubenchmark.net/cpu_list.php))上搜索对应CPU型号的评分,与其他人的配置对比,就可以知道CPU的性能是否足够。
+流星监测程序一般对显卡没有要求,因此只需选择 CPU 算力足够的型号即可。可以在各种“CPU 天梯”网站(例如[这个网站](https://www.cpubenchmark.net/cpu_list.php))上搜索对应 CPU 型号的评分,与其他人的配置对比,就可以知道 CPU 的性能是否足够。
-例如,我自己的笔记本电脑CPU是i7-7700HQ,运行流星监控程序没有压力,那么我就可以放心选择搭载i5-8250U的工控机,因为这两个CPU的评分差不多。
+例如,我自己的笔记本电脑 CPU 是 i7-7700HQ,运行流星监控程序没有压力,那么我就可以放心选择搭载 i5-8250U 的工控机,因为这两个 CPU 的评分差不多。
-
+
另外,尽可能选配更大的内存和固态硬盘,因为流星出现时需要快速写入文件,否则就会出现丢帧问题。
@@ -20,24 +20,24 @@
安装在室外的电脑需要一个防水箱(如第一节的图中所示),也很容易买到。不过要特别注意散热和遮阳,有的防水箱没有散热孔,电脑产生的热量无法排出。另外,夏天太阳直射的地方防水箱本身也会非常烫,所以也可以增加一些简单的遮阳。
-一般来说金属的防水箱更适合散热,但是金属箱体会阻隔4G或wifi信号。所以如果使用wifi连接网络,路由器最好安装在近处。
+一般来说金属的防水箱更适合散热,但是金属箱体会阻隔 4G 或 wifi 信号。所以如果使用 wifi 连接网络,路由器最好安装在近处。
-电脑可能会因为各种各样的原因断电,所以来电自启功能就非常重要,否则每次都要到拆开防水壳按开机键。部分主板的bios设置提供了来电自启功能和定时开机功能,非常方便。注意使用这些功能需要把windows的“快速启动”关闭。如果bios没有这个功能,可以在电脑上安装一个来电自启的硬件,售价只需要几块钱。
+电脑可能会因为各种各样的原因断电,所以来电自启功能就非常重要,否则每次都要到拆开防水壳按开机键。部分主板的 bios 设置提供了来电自启功能和定时开机功能,非常方便。注意使用这些功能需要把 windows 的“快速启动”关闭。如果 bios 没有这个功能,可以在电脑上安装一个来电自启的硬件,售价只需要几块钱。
-
+
-
+
-另外,部分QHY相机在特定版本win10的电脑上,电脑重启后相机无法正常工作。解决这个问题,要么将相机重新拔插,要么将电脑完全断电后再送电开机。因此,安装时最好把电源插头放在容易操作的位置。也可以再加一个可以远程控制的“智能插座”,但是插座本身需要wifi连接,如果为此再加路由器,就会提高整个系统的复杂度,不是很推荐。
+另外,部分 QHY 相机在特定版本 win10 的电脑上,电脑重启后相机无法正常工作。解决这个问题,要么将相机重新拔插,要么将电脑完全断电后再送电开机。因此,安装时最好把电源插头放在容易操作的位置。也可以再加一个可以远程控制的“智能插座”,但是插座本身需要 wifi 连接,如果为此再加路由器,就会提高整个系统的复杂度,不是很推荐。
## 遥控
安装在室外的电脑一般用采用远程桌面的方式遥控。常见的远程桌面软件有:
-* windows远程桌面
-* [Teamviewer](https://www.teamviewer.cn/cn/)
-* [向日葵](https://sunlogin.oray.com/download?categ=personal)
-* [Parsec](https://parsec.app/)
-* QQ
-
-这些软件的具体教程可以在网络上找到。在局域网中,最方便的远程桌面是windows自带的远程桌面功能。其他几个软件大同小异,都可以在非局域网上进行远程控制。其中QQ也有远程桌面功能,可以登录一个qq号,设置自动接受远程控制。但是qq的远程控制需要把uac完全关闭,可能是一个安全隐患。
\ No newline at end of file
+- windows 远程桌面
+- [Teamviewer](https://www.teamviewer.cn/cn/)
+- [向日葵](https://sunlogin.oray.com/download?categ=personal)
+- [Parsec](https://parsec.app/)
+- QQ
+
+这些软件的具体教程可以在网络上找到。在局域网中,最方便的远程桌面是 windows 自带的远程桌面功能。其他几个软件大同小异,都可以在非局域网上进行远程控制。其中 QQ 也有远程桌面功能,可以登录一个 qq 号,设置自动接受远程控制。但是 qq 的远程控制需要把 uac 完全关闭,可能是一个安全隐患。
diff --git a/docs/hardware/howto.md b/docs/hardware/howto.md
index cf81ccf..64e317c 100644
--- a/docs/hardware/howto.md
+++ b/docs/hardware/howto.md
@@ -12,13 +12,12 @@
相机安装在户外长时间指向天空,因此防水是必须的。户外用的安防摄像头一般都自带防水,有的还有雨刮器。但是如果用天文相机,就需要我们自己组装防水壳。
-在电脑这边,有两种选择。如果使用网络摄像头,可以将电脑安装在室内,用网线把相机和电脑连接在一起。摄像头可以用过网线的POE供电,所以连接相机只需要这一根线。网线的通信距离可以有几十米,因此足够连接到室内。
+在电脑这边,有两种选择。如果使用网络摄像头,可以将电脑安装在室内,用网线把相机和电脑连接在一起。摄像头可以用过网线的 POE 供电,所以连接相机只需要这一根线。网线的通信距离可以有几十米,因此足够连接到室内。
-但是如果用的是天文相机,或者不方便在室内与相机之间连网线的情况下,就需要将电脑与相机安装在一起,也需要做防水处理。天文相机,尤其是采用USB3.0的相机,线缆的长度最多只支持5m,所以很难连接到室内。
+但是如果用的是天文相机,或者不方便在室内与相机之间连网线的情况下,就需要将电脑与相机安装在一起,也需要做防水处理。天文相机,尤其是采用 USB3.0 的相机,线缆的长度最多只支持 5m,所以很难连接到室内。
最终安装好的设备可能形似下面这几张图,这些是我在不同时期搭建过的流星监测设备,可以看出不同的技术路线。
-
|  |  |
| ----------------------------- | ----------------------------- |
|  |  |
diff --git a/docs/index.md b/docs/index.md
index 3847097..a498ed4 100644
--- a/docs/index.md
+++ b/docs/index.md
@@ -17,7 +17,6 @@ hero:
- theme: alt
text: 在GitHub上查看
link: https://github.com/quan787/blog_meteoroid_fit
-
# features:
# - title: link
# details: 1
@@ -25,4 +24,4 @@ hero:
# details: With Markdown-centered content, it's built to help you focus on writing and deployed with minimum configuration.
# - title: 架设流星探测设备
# details: Enhance your content with all the features of Vue in Markdown, while being able to customize your site with Vue.
----
\ No newline at end of file
+---
diff --git a/docs/meteor/DFN.md b/docs/meteor/DFN.md
index 4ad0912..4c98399 100644
--- a/docs/meteor/DFN.md
+++ b/docs/meteor/DFN.md
@@ -6,54 +6,53 @@
## 相机设计
-DFN的首要目标是:通过对火流星的多站观测,测量流星的下落轨迹,计算陨石的落点,进而寻找陨石。因此,DFN并不过多着重于观测到更暗(更多)的流星,而是将关注点放在了对火流星的精确测量上。作者对比了其他流星监测网的方案,没有选择他们的模拟摄像头,转而选择了数码单反。单反的分辨率高于摄像头,所以可以获得更高的空间精度。
+DFN 的首要目标是:通过对火流星的多站观测,测量流星的下落轨迹,计算陨石的落点,进而寻找陨石。因此,DFN 并不过多着重于观测到更暗(更多)的流星,而是将关注点放在了对火流星的精确测量上。作者对比了其他流星监测网的方案,没有选择他们的模拟摄像头,转而选择了数码单反。单反的分辨率高于摄像头,所以可以获得更高的空间精度。
-DFN的观测设备主体由一台尼康D810和一个鱼眼镜头组成。单反相机的观测模式是连续的30秒曝光。有火流星时,流星就会在画面中形成一条轨迹,非常类似于摄影爱好者拍摄出的流星照片。但如果仅仅这样拍摄,流星的时间和速度信息就丢失了,因为流星可能出现在30秒曝光中的任意一秒,速度也无法测量出来。
+DFN 的观测设备主体由一台尼康 D810 和一个鱼眼镜头组成。单反相机的观测模式是连续的 30 秒曝光。有火流星时,流星就会在画面中形成一条轨迹,非常类似于摄影爱好者拍摄出的流星照片。但如果仅仅这样拍摄,流星的时间和速度信息就丢失了,因为流星可能出现在 30 秒曝光中的任意一秒,速度也无法测量出来。
在几十年前用胶片相机进行流星观测时就有相应的技术,那时候采用的是旋转快门,就是在镜头前面放一个匀速旋转的小风扇,以固定的间隔挡住进入镜头的光,这样流星的轨迹就会被切成一段一段,因为时间间隔是已知的,那么测量轨迹片段的长度,就可以计算流星的速度了。
-而DFN团队在这个基础上更进一步。他们采用的不是固定转速的旋转快门,而是可以自由操控的液晶快门。液晶快门就像是老式计算器的显示屏一样,通电会变成黑色不透光,断电会变透明。用液晶快门也可以控制进入镜头的光,并且没有机械结构,大大增加了可靠性和寿命。
+而 DFN 团队在这个基础上更进一步。他们采用的不是固定转速的旋转快门,而是可以自由操控的液晶快门。液晶快门就像是老式计算器的显示屏一样,通电会变成黑色不透光,断电会变透明。用液晶快门也可以控制进入镜头的光,并且没有机械结构,大大增加了可靠性和寿命。
-在此基础上,DFN团队采用了一种特殊的编码(De Bruijn序列)来控制快门的通断。从第1秒到第30秒,这种编码完全不重复,就像莫尔斯码一样,将1和0编码进流星的轨迹。我们从流星的轨迹中解读出一个片段,就可以找到这个片段来自于1-30秒的第几秒。这样流星出现的具体时间就测出来了。
+在此基础上,DFN 团队采用了一种特殊的编码(De Bruijn 序列)来控制快门的通断。从第 1 秒到第 30 秒,这种编码完全不重复,就像莫尔斯码一样,将 1 和 0 编码进流星的轨迹。我们从流星的轨迹中解读出一个片段,就可以找到这个片段来自于 1-30 秒的第几秒。这样流星出现的具体时间就测出来了。
-
+
-液晶快门的通断是由一个单片机控制的,单片机的时间来自于GPS的授时。有了这个技术,即使曝光时间长达30秒,对流星的时间测量依然可以达到20ms量级。
+液晶快门的通断是由一个单片机控制的,单片机的时间来自于 GPS 的授时。有了这个技术,即使曝光时间长达 30 秒,对流星的时间测量依然可以达到 20ms 量级。
-所以,使用30秒的曝光时间搭配液晶快门可以获得与视频摄像头相近的时间分辨率,以及更高的空间分辨率。再加上30秒只需要存储一张照片,对存储的负担也小于视频摄像头,甚至可以将所有照片都存在硬盘中。
+所以,使用 30 秒的曝光时间搭配液晶快门可以获得与视频摄像头相近的时间分辨率,以及更高的空间分辨率。再加上 30 秒只需要存储一张照片,对存储的负担也小于视频摄像头,甚至可以将所有照片都存在硬盘中。
-不过,30秒的曝光大大降低了对暗流星的探测能力。拍摄星空照片时,因为恒星的移动很慢,30秒曝光过可以拍到很暗的极限星等;但是流星持续时间只有几秒钟,并且是移动目标,亮度是不随曝光时间增长而变亮的。因此长曝光时,暗流星很容易就淹没在天光中了。因此,DFN对于流星的极限星等只有0等左右,远不如视频摄像头。由于这个网络的目的就是寻找陨石,因此暗流星并不重要,这就是它们可以放心采用这种技术路线的原因。
+不过,30 秒的曝光大大降低了对暗流星的探测能力。拍摄星空照片时,因为恒星的移动很慢,30 秒曝光过可以拍到很暗的极限星等;但是流星持续时间只有几秒钟,并且是移动目标,亮度是不随曝光时间增长而变亮的。因此长曝光时,暗流星很容易就淹没在天光中了。因此,DFN 对于流星的极限星等只有 0 等左右,远不如视频摄像头。由于这个网络的目的就是寻找陨石,因此暗流星并不重要,这就是它们可以放心采用这种技术路线的原因。
## 外围硬件和网络架构
围绕单反相机,有负责控制和存储数据的电脑,和控制快门的单片机。数据存储在本地的硬盘中,也可以通过有线网络或手机信号进行通信。整个设备的架构如下:
-
+
-
+
-系统用太阳能板供电,所有设备安装在一个防水箱中,相机的镜头从防水箱的上部伸出。由于安装在沙漠中,箱内有较大的散热需求。DFN团队设计了一个3D打印的排风道,将散热风扇向外的排气引向镜头附近,让镜头附近始终有流动的空气,所以也避免了沙尘在镜头表面的堆积。
+系统用太阳能板供电,所有设备安装在一个防水箱中,相机的镜头从防水箱的上部伸出。由于安装在沙漠中,箱内有较大的散热需求。DFN 团队设计了一个 3D 打印的排风道,将散热风扇向外的排气引向镜头附近,让镜头附近始终有流动的空气,所以也避免了沙尘在镜头表面的堆积。
-
+
-数据传输方面,尽管设备可以用网络传输数据,但主要还是通过更换硬盘来完成。每台设备配备两个6TB的机械硬盘。控制相机的电脑会将鱼眼画面的边缘部分删去,再加上文件压缩算法,写满两个硬盘的时间大约是8-10个月。所以每隔半年左右,团队会开车到设备现场进行维护,更换写满的硬盘。车上还会准备一套完整的设备,如果现场的设备出现问题,可以整体替换下来,整个过程可以在一天之内完成。
+数据传输方面,尽管设备可以用网络传输数据,但主要还是通过更换硬盘来完成。每台设备配备两个 6TB 的机械硬盘。控制相机的电脑会将鱼眼画面的边缘部分删去,再加上文件压缩算法,写满两个硬盘的时间大约是 8-10 个月。所以每隔半年左右,团队会开车到设备现场进行维护,更换写满的硬盘。车上还会准备一套完整的设备,如果现场的设备出现问题,可以整体替换下来,整个过程可以在一天之内完成。
-
+
-截至2016年底,DFN共有了49个站点,覆盖了大约250万平方公里的面积,约占澳大利亚的三分之一。这些站点大多数都位于荒漠之中,如果有陨石坠落,落地的陨石在浅色的地面上比较显眼,因此容易寻找。
+截至 2016 年底,DFN 共有了 49 个站点,覆盖了大约 250 万平方公里的面积,约占澳大利亚的三分之一。这些站点大多数都位于荒漠之中,如果有陨石坠落,落地的陨石在浅色的地面上比较显眼,因此容易寻找。
## 寻找陨石
-2015年底,DFN寻获了一颗1.7kg的陨石,命名为[murrili](https://en.wikipedia.org/wiki/Murrili_meteorite)。这颗陨石坠落时,有4个站点拍摄到了它的轨迹。根据三维定位结果,团队根据空气动力学原理,推算了陨石的落点。值得一提的是,在计算陨石下落的轨迹时,高空中的风向和风速也考虑在内。陨石落在一个盐湖中,深入湖床42cm。
+2015 年底,DFN 寻获了一颗 1.7kg 的陨石,命名为[murrili](https://en.wikipedia.org/wiki/Murrili_meteorite)。这颗陨石坠落时,有 4 个站点拍摄到了它的轨迹。根据三维定位结果,团队根据空气动力学原理,推算了陨石的落点。值得一提的是,在计算陨石下落的轨迹时,高空中的风向和风速也考虑在内。陨石落在一个盐湖中,深入湖床 42cm。
-
+
-2016年,DFN找到了第二颗陨石,1.15千克的[Dingle Dell](https://en.wikipedia.org/wiki/Dingle_Dell_meteorite)[^2]。这一次,预报的落点和实际的落点只相差130m。
+2016 年,DFN 找到了第二颗陨石,1.15 千克的[Dingle Dell](https://en.wikipedia.org/wiki/Dingle_Dell_meteorite)[^2]。这一次,预报的落点和实际的落点只相差 130m。
-
+
-
+
-[^1]:[How to build a continental scale fireball camera network](https://link.springer.com/article/10.1007/s10686-017-9532-7)
-
-[^2]:[The Dingle Dell meteorite: a Halloween treat from the Main Belt](https://arxiv.org/abs/1803.02557)
\ No newline at end of file
+[^1]: [How to build a continental scale fireball camera network](https://link.springer.com/article/10.1007/s10686-017-9532-7)
+[^2]: [The Dingle Dell meteorite: a Halloween treat from the Main Belt](https://arxiv.org/abs/1803.02557)
diff --git a/docs/meteor/camera.md b/docs/meteor/camera.md
index c6b43ac..f3414e1 100644
--- a/docs/meteor/camera.md
+++ b/docs/meteor/camera.md
@@ -8,37 +8,35 @@
对于天文望远镜来说,最重要的参数莫过于口径。望远镜的口径越大,极限星等就越高。这就是因为大口径的望远镜可以收集到更多的光子,把所有来自于一颗星的光子都汇聚到传感器上的特定位置,这样我们就可以看到更明亮的星像。流星相机采用的广角镜头,大致的原理也是这样。虽然没有标明,但口径可以用焦距除以光圈来大致估计。口径越大,对恒星的极限星等就越高。
-口径可以影响极限星等,但这并不是全部。我们日常用镜头拍摄的景物,大多数是面光源,也就是说,同一个光源发出的光并不是集中在一个像素上,而是有一定的尺寸。镜头的焦距越长,成像的放大率就越大。本来镜头收集到的光子数是一定的,成像的面积越大,那么传感器上单位面积分到的光子就少了,也就是说像变暗了。我们可以想象,对于光圈一定的镜头来说,焦距增加可以带来口径增大,焦距每增大为2倍,那么集光面积就会增大4倍;但同时成像的面积由于焦距增加,也变成了原来的4倍,所以单位面积收到的光子数实际是没变的。所以,在摄影中,决定画面亮度的是光圈而不是口径,这也是镜头上并不标注口径的原因。对于拍摄星云的天文摄影来说也是这样,焦比更小(“更快”)的望远镜更适合深空摄影。
+口径可以影响极限星等,但这并不是全部。我们日常用镜头拍摄的景物,大多数是面光源,也就是说,同一个光源发出的光并不是集中在一个像素上,而是有一定的尺寸。镜头的焦距越长,成像的放大率就越大。本来镜头收集到的光子数是一定的,成像的面积越大,那么传感器上单位面积分到的光子就少了,也就是说像变暗了。我们可以想象,对于光圈一定的镜头来说,焦距增加可以带来口径增大,焦距每增大为 2 倍,那么集光面积就会增大 4 倍;但同时成像的面积由于焦距增加,也变成了原来的 4 倍,所以单位面积收到的光子数实际是没变的。所以,在摄影中,决定画面亮度的是光圈而不是口径,这也是镜头上并不标注口径的原因。对于拍摄星云的天文摄影来说也是这样,焦比更小(“更快”)的望远镜更适合深空摄影。
我们对比可以看到,恒星是点状光源,不管放多大都是点状,所以探测极限主要与口径有关;摄影镜头拍摄的是面光源,探测极限主要与光圈(焦比)有关。那么,流星是一种什么光源呢?流星其实是介于两者之间的“线光源”,因为增加焦距时,流星的长度会按比例增加,但是宽度的增加并不明显。所以,流星的“面积”与焦距成线性关系,而不是面光源的平方关系,焦距的增加只能抵消一部分口径的效应,所以流星是介于点光源和面光源之间的特殊情况。
-从下图中可以看出,焦距增大为2倍时,恒星(点光源)保持不变,星云(面光源)面积增大4倍,流星(线光源)面积增大2倍。
+从下图中可以看出,焦距增大为 2 倍时,恒星(点光源)保持不变,星云(面光源)面积增大 4 倍,流星(线光源)面积增大 2 倍。
-
+
-所以绕了一圈,流星的探测极限与口径(也就是焦距除以光圈)和光圈都有关系。光圈越大(比如F0.95),焦距越长,拍到的流星就越多,画质就越好。这仿佛什么都没说,不过好在,市面上的镜头最大光圈其实没有很大的差距。比较常见的广角镜头通常光圈是F1.4,有特殊的超大光圈镜头比如F0.95,当然也有一些便宜的镜头光圈只有F2.8,这些镜头的效果就差一些了。
+所以绕了一圈,流星的探测极限与口径(也就是焦距除以光圈)和光圈都有关系。光圈越大(比如 F0.95),焦距越长,拍到的流星就越多,画质就越好。这仿佛什么都没说,不过好在,市面上的镜头最大光圈其实没有很大的差距。比较常见的广角镜头通常光圈是 F1.4,有特殊的超大光圈镜头比如 F0.95,当然也有一些便宜的镜头光圈只有 F2.8,这些镜头的效果就差一些了。
## 相机
上一节我们说,光圈越大,焦距越长,更有利于流星探测。这就带来一个问题:长焦的镜头,装在我的相机上,视野不就变小了吗?拍到流星的概率显然与视野大小有关,所以视野也不能太小。决定相机视野大小的主要有两个因素:镜头焦距和传感器尺寸。焦距除以传感器尺寸,这个值越大,视野就越小。所以,如果选用更大面积的传感器,就可以既增加集光面积,又保持视野不变了。
-不过由于镜头光学设计的限制,镜头的成像区域是有限的,传感器的面积不能大于成像区域。比如一个摄像头用的标准镜头,我们并不能把它安装在全画幅单反上当做鱼眼使用。我们选择镜头和相机时,需要注意镜头是适配多大画幅的传感器。传感器的尺寸通常通“英寸”来表示,比如1/1.2英寸,2/3英寸等。在这些数值之上,是更大的APS-C,全画幅,中画幅等相机画幅[^2]。
+不过由于镜头光学设计的限制,镜头的成像区域是有限的,传感器的面积不能大于成像区域。比如一个摄像头用的标准镜头,我们并不能把它安装在全画幅单反上当做鱼眼使用。我们选择镜头和相机时,需要注意镜头是适配多大画幅的传感器。传感器的尺寸通常通“英寸”来表示,比如 1/1.2 英寸,2/3 英寸等。在这些数值之上,是更大的 APS-C,全画幅,中画幅等相机画幅[^2]。
-镜头也都会标明适配的画幅大小。例如佳能的EF-S镜头就适配APS-C画幅,EF镜头就可以适配全画幅。监控用的镜头会标明适配多少英寸的靶面,选购时需要选择大于相机靶面的镜头。对于QHY174相机来说,它的靶面大小是1/1.2英寸,而镜头有1英寸、1/1.8英寸、2/3英寸多种,这时候只能选择更大的1英寸镜头。使用画幅不够大的镜头会出现明显的暗角。
+镜头也都会标明适配的画幅大小。例如佳能的 EF-S 镜头就适配 APS-C 画幅,EF 镜头就可以适配全画幅。监控用的镜头会标明适配多少英寸的靶面,选购时需要选择大于相机靶面的镜头。对于 QHY174 相机来说,它的靶面大小是 1/1.2 英寸,而镜头有 1 英寸、1/1.8 英寸、2/3 英寸多种,这时候只能选择更大的 1 英寸镜头。使用画幅不够大的镜头会出现明显的暗角。
-
+
-其实说到这里,大家可能已经意识到了,在流星探测中“底大一级压死人”这个规律依然成立。站在流星监控顶端的,就是索尼的单反相机加上大光圈的广角镜头。在流星雨期间,其他人的摄像头只能拍到几十颗,这样的设备甚至可以拍到上千颗流星。下图是单反拍摄的视频截图,25fps下依然有很高的极限星等。
+其实说到这里,大家可能已经意识到了,在流星探测中“底大一级压死人”这个规律依然成立。站在流星监控顶端的,就是索尼的单反相机加上大光圈的广角镜头。在流星雨期间,其他人的摄像头只能拍到几十颗,这样的设备甚至可以拍到上千颗流星。下图是单反拍摄的视频截图,25fps 下依然有很高的极限星等。
-
+
-还有一些其他的因素也会影响流星探测效率。分辨率高的相机画面可能偏暗,因为接收到的光子会分配到更多像素上;CMOS的量子效率和填充因子,影响光子转换成电子的效率;彩色相机的拜耳滤镜会滤掉颜色不符合的光,所以相同的传感器,单色的型号探测流星效率更高。这些因素可能不会带来数量级的差距,不过在实际操作中可以观察到明显的不同。
+还有一些其他的因素也会影响流星探测效率。分辨率高的相机画面可能偏暗,因为接收到的光子会分配到更多像素上;CMOS 的量子效率和填充因子,影响光子转换成电子的效率;彩色相机的拜耳滤镜会滤掉颜色不符合的光,所以相同的传感器,单色的型号探测流星效率更高。这些因素可能不会带来数量级的差距,不过在实际操作中可以观察到明显的不同。
# 总结
-所以,我们选购镜头和相机自行组装流星相机时,可以首先根据预算确定靶面大小。价格相似时,选择靶面更大的相机,例如选174而不是178;然后根据靶面大小,选择对应的镜头。不要过于追求广角:因为广角镜头焦距短,口径小,极限星等较低,有时候画质也较差。选择视野在90度左右的普通广角镜头更适合流星监控。
+所以,我们选购镜头和相机自行组装流星相机时,可以首先根据预算确定靶面大小。价格相似时,选择靶面更大的相机,例如选 174 而不是 178;然后根据靶面大小,选择对应的镜头。不要过于追求广角:因为广角镜头焦距短,口径小,极限星等较低,有时候画质也较差。选择视野在 90 度左右的普通广角镜头更适合流星监控。
-
-[^1]:程思浩. 流星漫谈(三)[J]. 天文爱好者, 2011(11):3.
-
-[^2]:[What is Crop Factor?](https://photographylife.com/what-is-crop-factor)
\ No newline at end of file
+[^1]: 程思浩. 流星漫谈(三)[J]. 天文爱好者, 2011(11):3.
+[^2]: [What is Crop Factor?](https://photographylife.com/what-is-crop-factor)
diff --git a/docs/meteor/concepts.md b/docs/meteor/concepts.md
index e57e3ee..79056e9 100644
--- a/docs/meteor/concepts.md
+++ b/docs/meteor/concepts.md
@@ -1,14 +1,14 @@
# 流星探测原理(1)
-常见的流星体尺寸在厘米、毫米量级,是行星际尘埃尺寸连续谱中的一部分。1米以上的小行星通过地面望远镜可以提前发现,但一米以下就很难了。尺寸在几十厘米、几厘米的流星体,只有在进入地球大气时才可以被观测到。
+常见的流星体尺寸在厘米、毫米量级,是行星际尘埃尺寸连续谱中的一部分。1 米以上的小行星通过地面望远镜可以提前发现,但一米以下就很难了。尺寸在几十厘米、几厘米的流星体,只有在进入地球大气时才可以被观测到。
-
+
除了之前说的探测长周期彗星之外,流星在其他几个方面也有独特的科学价值。
-* 研究太阳系中尘埃的尺寸、分布、演化,从而可以解答一些关于小天体、太阳系形成与演化的问题;
-* 已知轨道的陨石非常稀少,目前只有几十颗[^1],轨道和成分相互对照有很高的科学价值;
-* 流星体对空间安全也有一定的威胁,例如曾有通信卫星在英仙座流星雨期间失效,就推测与流星雨活动有关。
+- 研究太阳系中尘埃的尺寸、分布、演化,从而可以解答一些关于小天体、太阳系形成与演化的问题;
+- 已知轨道的陨石非常稀少,目前只有几十颗[^1],轨道和成分相互对照有很高的科学价值;
+- 流星体对空间安全也有一定的威胁,例如曾有通信卫星在英仙座流星雨期间失效,就推测与流星雨活动有关。
流星是一类非常独特的天文现象,对流星的观测自然也是独辟蹊径,非常迥异于其他天象。流星的观测大致可以分为射电观测和可见光观测。两个观测手段都有爱好者和专业研究人员参与。
@@ -16,13 +16,13 @@
在射电波段,主要观测流星和余迹反射的无线电波。无线电波可以是观测者主动发射的(通常称作“流星雷达”),也可以是远处其他发射源发射的,通常是广播电台或者其他信标台。而靠流星余迹反射,甚至可以进行远距离通信,有其特定的应用场景。
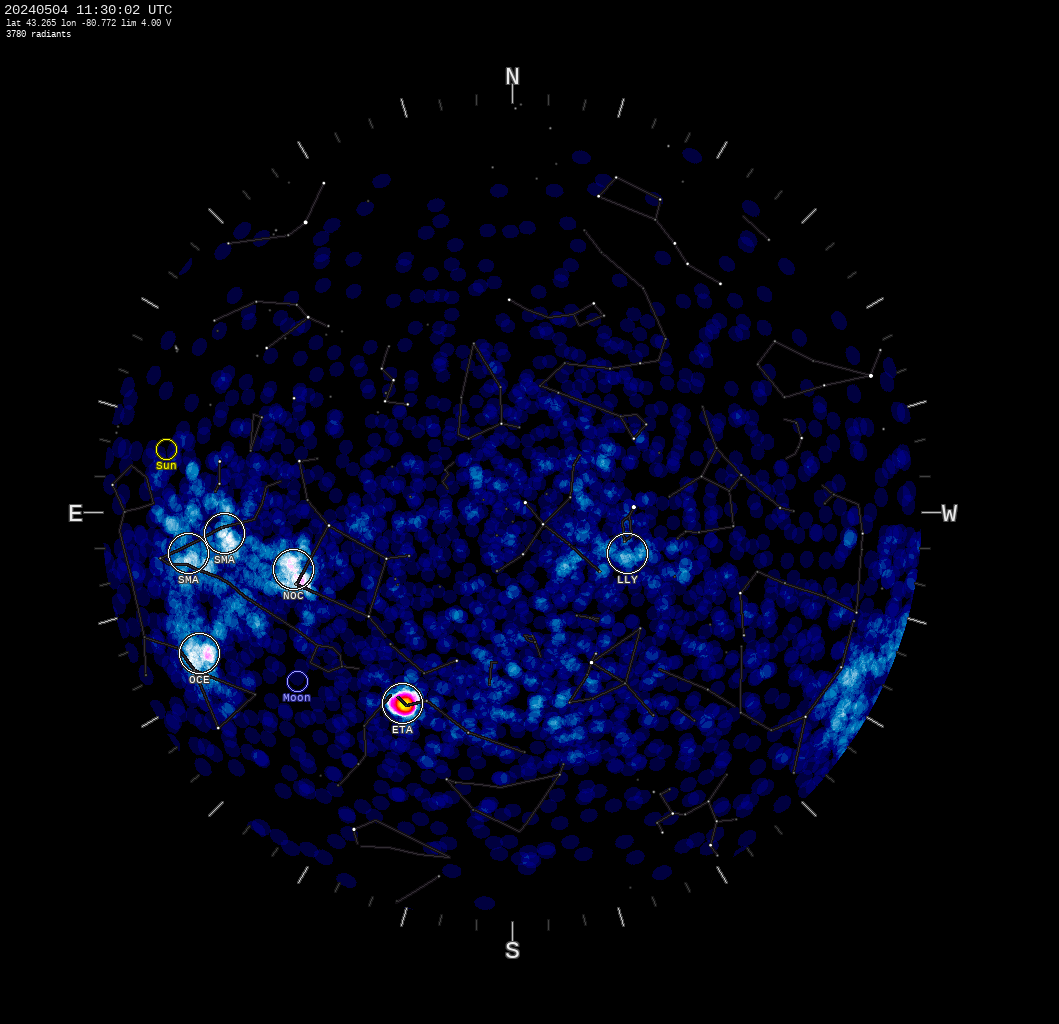
-射电观测的突出优点是可以昼夜运行。很多流星群的辐射点接近太阳,只在白天升起,不可能在光学波段观测到。也就是说,这些流星雨只发生在白天。雷达观测就发现了很多这样的流星群。另外,射电波段能观测到很暗的流星。例如2012年天龙座流星雨,雷达观测到了ZHR达到9000的爆发,而可见光观测到的流星ZHR只有200左右[^2]。
+射电观测的突出优点是可以昼夜运行。很多流星群的辐射点接近太阳,只在白天升起,不可能在光学波段观测到。也就是说,这些流星雨只发生在白天。雷达观测就发现了很多这样的流星群。另外,射电波段能观测到很暗的流星。例如 2012 年天龙座流星雨,雷达观测到了 ZHR 达到 9000 的爆发,而可见光观测到的流星 ZHR 只有 200 左右[^2]。
-
+
-* 上图是实时的[^3]
+- 上图是实时的[^3]
-但是,流星雷达对流星的测量不如光学观测精确。由于波长较长等原因,流星雷达只能将流星的位置精确到千米量级,而光学波段可以达到10米。而依赖广播电台的“听”流星,就完全无法测量流星的方位,只能进行计数。此外,根据一些研究[^4],射电流星和光学流星的对应关系也并不是很确切。并不是所有光学流星都有无线电回波,这可能与流星轨迹的朝向有关系;同时,流星的亮度与雷达反射面积(RCS)有正相关的关系,但误差比较大。
+但是,流星雷达对流星的测量不如光学观测精确。由于波长较长等原因,流星雷达只能将流星的位置精确到千米量级,而光学波段可以达到 10 米。而依赖广播电台的“听”流星,就完全无法测量流星的方位,只能进行计数。此外,根据一些研究[^4],射电流星和光学流星的对应关系也并不是很确切。并不是所有光学流星都有无线电回波,这可能与流星轨迹的朝向有关系;同时,流星的亮度与雷达反射面积(RCS)有正相关的关系,但误差比较大。
因为流星雷达技术难度较大,再加上无线电法规的限制,国内基本没有爱好者涉足(或者很低调)。
@@ -32,28 +32,25 @@
在光学观测上,流星有如下特点:
-* **时标短**:流星几乎是我们常见的天文现象中时标最短的。大部分流星持续发光的时间都小于1秒,只有比较亮的慢速流星发光时间会达到几秒钟。在这短短的1秒钟内,我们需要获取流星的轨迹、亮度变化等信息。
-* **随机性**:流星是随机出现的。流星基本来自于行星际空间中的小颗粒,这些颗粒进入地球大气之无法被观测到,自然也无法预测。这就造成我们很难使用望远镜去观测流星,因为望远镜的视场太小。
-* **距离近**:流星开始发光的位置一般在离地面100km左右。相较于其他天体,流星的距离是非常非常近的。在相隔几十千米的位置观测,流星的位置都会明显不同——这就是三角视差。
+- **时标短**:流星几乎是我们常见的天文现象中时标最短的。大部分流星持续发光的时间都小于 1 秒,只有比较亮的慢速流星发光时间会达到几秒钟。在这短短的 1 秒钟内,我们需要获取流星的轨迹、亮度变化等信息。
+- **随机性**:流星是随机出现的。流星基本来自于行星际空间中的小颗粒,这些颗粒进入地球大气之无法被观测到,自然也无法预测。这就造成我们很难使用望远镜去观测流星,因为望远镜的视场太小。
+- **距离近**:流星开始发光的位置一般在离地面 100km 左右。相较于其他天体,流星的距离是非常非常近的。在相隔几十千米的位置观测,流星的位置都会明显不同——这就是三角视差。
我们对在对流星进行光学观测时主要就是围绕着三个特点。因为流星持续时间很短,为了在较短的时间内获取尽可能多的数据,拍摄流星的视频是一个很自然的对策。每一帧视频都代表着流星在这个时间点上的位置,视频连起来就得到了轨迹,从中就可以得到流星的速度信息。
因为流星出现的随机性,为了尽可能多的探测流星,我们只能增加覆盖的天区面积。所以,大部分流星相机都采用的是鱼眼或广角镜头。
-而第三点,其实是流星光学观测的立身之本——通过三角视差,可以很方便的测量流星的三维位置。通常天文观测中,距离很远的天体是很难测距的。即使是离太阳较近的恒星,周年视差都小于1角秒,很难测准,因此测出来的距离误差很大。对于流星来说,间隔几十公里就可以得到几十度的视差,因此我们就可以综合多个观测站测量到的流星坐标,计算出流星在三维空间中的位置,三个维度都精确到10m的量级。
+而第三点,其实是流星光学观测的立身之本——通过三角视差,可以很方便的测量流星的三维位置。通常天文观测中,距离很远的天体是很难测距的。即使是离太阳较近的恒星,周年视差都小于 1 角秒,很难测准,因此测出来的距离误差很大。对于流星来说,间隔几十公里就可以得到几十度的视差,因此我们就可以综合多个观测站测量到的流星坐标,计算出流星在三维空间中的位置,三个维度都精确到 10m 的量级。
-
+
如上图所示,同一颗流星在两个观测站看来方向是不同的。单个站点此时只能知道流星的方向,不知道流星的距离,所以对于单个站点来说,流星可能的位置在空间中构成一条射线,流星可能在这条射线上的任意一个位置。但如果我们有两个站点的数据,相当于两条射线,那流星的位置只可能是在这两条射线的交点上,流星的位置就确定了。
-有的人以为确定流星位置需要3个站点的数据,其实两个站点就够了。因为单站观测可以获取两个维度(比如赤经赤纬)的数据,两个站点就有4个已知量,因此可以解出空间位置的3个未知量。
+有的人以为确定流星位置需要 3 个站点的数据,其实两个站点就够了。因为单站观测可以获取两个维度(比如赤经赤纬)的数据,两个站点就有 4 个已知量,因此可以解出空间位置的 3 个未知量。
因此,流星光学观测的主要方式就是:大视场、视频、多站。大视场可以确保尽可能多的拍到流星;视频观测可以获取流星的速度和光变信息;而多站观测才可以获取流星的三维轨迹。同时,观测站点越多,覆盖的范围越大,观测到的流星也就越多。这就要求我们以适当的间隔布置大量的流星相机,这是一个耗费时间精力的工作,所以爱好者在其中的参与至关重要。
-[^1]:[Meteorites with photographic orbits](https://www.meteoriteorbits.info/)
-
-[^2]:[The Unexpected 2012 Draconid Meteor Storm](https://arxiv.org/abs/1311.1733)
-
-[^3]:[Radar meteor radiants](https://fireballs.ndc.nasa.gov/cmor-radiants/)
-
-[^4]:[FRIPON: A worldwide network to track incoming meteoroids](https://www.aanda.org/articles/aa/full_html/2020/12/aa38649-20/aa38649-20.html)
\ No newline at end of file
+[^1]: [Meteorites with photographic orbits](https://www.meteoriteorbits.info/)
+[^2]: [The Unexpected 2012 Draconid Meteor Storm](https://arxiv.org/abs/1311.1733)
+[^3]: [Radar meteor radiants](https://fireballs.ndc.nasa.gov/cmor-radiants/)
+[^4]: [FRIPON: A worldwide network to track incoming meteoroids](https://www.aanda.org/articles/aa/full_html/2020/12/aa38649-20/aa38649-20.html)
diff --git a/docs/meteor/concepts2.md b/docs/meteor/concepts2.md
index 4917a9b..6b6691f 100644
--- a/docs/meteor/concepts2.md
+++ b/docs/meteor/concepts2.md
@@ -8,7 +8,7 @@
1. 测量流星的视频坐标,并转换成天球坐标
1. 用多站计算流星的三维轨迹
-这个思路我们从已有的流星观测软件就可以看出:UFOCapture套件就分成三部分,UFOCapture负责流星监测,UFOAnalyzer负责测量流星坐标,UFOOrbiter负责对流星进行定轨。其他流星监测网的自有软件也基本符合这个思路。
+这个思路我们从已有的流星观测软件就可以看出:UFOCapture 套件就分成三部分,UFOCapture 负责流星监测,UFOAnalyzer 负责测量流星坐标,UFOOrbiter 负责对流星进行定轨。其他流星监测网的自有软件也基本符合这个思路。
## 拍摄流星的视频
@@ -16,15 +16,15 @@
与普通的天文观测不同,每个课题申请大型望远镜的观测时间常常以天或者小时计,而观测到的数据可能会处理几个月到一年,因此有大量的时间对图像进行精细的处理。而流星探测不一样,只要天气是好的,相机就会一直开着,一直会产生大量的数据。
-因为流星观测拍的是“视频”,它产生的数据量也显著大于大型望远镜(可能LSST这样的巡天望远镜除外)。假设一个1920×1080的单色相机,每个像素1字节,每秒拍摄30帧画面,产生的数据量就是1920×1080×1×30≈60MB/s,每分钟就是3.6GB,每小时就是216GB。如果是彩色相机,数据量还会变成3倍;如果是16位的相机,就再2倍;如果是4k的相机,就再乘以4。积累起来会变成天文数字。
+因为流星观测拍的是“视频”,它产生的数据量也显著大于大型望远镜(可能 LSST 这样的巡天望远镜除外)。假设一个 1920×1080 的单色相机,每个像素 1 字节,每秒拍摄 30 帧画面,产生的数据量就是 1920×1080×1×30≈60MB/s,每分钟就是 3.6GB,每小时就是 216GB。如果是彩色相机,数据量还会变成 3 倍;如果是 16 位的相机,就再 2 倍;如果是 4k 的相机,就再乘以 4。积累起来会变成天文数字。
-如此多的数据量就造成一个问题:我们常见的“先存下来再慢慢处理”模式就不合适了。一方面,每天存储如此大的数据量成本非常高;另一方面,相机每天工作10个小时,而这些数据必须得在24小时内处理完,否则第二天的数据就又堆积起来了。
+如此多的数据量就造成一个问题:我们常见的“先存下来再慢慢处理”模式就不合适了。一方面,每天存储如此大的数据量成本非常高;另一方面,相机每天工作 10 个小时,而这些数据必须得在 24 小时内处理完,否则第二天的数据就又堆积起来了。
更可恨的是,没有流星雨的夜晚,可能一整晚也就只有十几颗流星而已,这十几颗流星的视频加在一起可能也没有一分钟,正可谓沙()里淘金,投入产出完全不成正比。
以上种种,都指向一种方案:实时检测视频画面中有没有流星,如果有就存储下来,没有就直接把数据扔掉,不写入硬盘里了。那么实时检测流星来得及吗?检测出有流星的时候,是不是流星已经消失了?不用怕,我们可以在内存中缓存前面几秒的视频,当发现有流星的时候,自动从前面几帧开始保存,流星消失之后,再往后保存几帧,防止流星被拦腰截断。很多手机拍照也有时间回溯的功能,用的就是这个原理。
-那么这样做,就意味着我们的软件可以实时处理几百MB每秒的数据流,一定要非常高效才行;同时准确性也要尽可能高,如果把流星漏过去了,数据就永远消失了。所以我一直认为,流星监测软件是流星视频观测中的核心技术。正因如此,UFOCapture能在爱好者群体中经久不衰,拥有难以替代的位置。
+那么这样做,就意味着我们的软件可以实时处理几百 MB 每秒的数据流,一定要非常高效才行;同时准确性也要尽可能高,如果把流星漏过去了,数据就永远消失了。所以我一直认为,流星监测软件是流星视频观测中的核心技术。正因如此,UFOCapture 能在爱好者群体中经久不衰,拥有难以替代的位置。
## 测量流星的坐标
@@ -32,9 +32,9 @@
流星定轨对流星坐标测量提出了要求:因为我们要综合多个站点的流星坐标,让它们的“射线”相交于同一点,所以所有观测站都要采用相同的坐标系。如果每个观测站采取的坐标系稍有不同,那相当于射线的方向有偏差,就无法相交到一起;并且,观测站的地理位置也一样重要,如果观测站的位置不对,相当于射线的端点有偏差,几条射线也没法相交到一起。
-所以,我们最终输入的流星坐标,一定要采用国际公认的、天地统一的坐标系。这样的坐标系有没有呢?当然有,那就是国际天球参考架ICRS。关于天体测量的内容非常复杂,不过简单来说,我们日常使用的赤经赤纬依赖这个参考架,而地面上的坐标,例如wgs84体系的经纬度,也可以换算到这个参考系里。
+所以,我们最终输入的流星坐标,一定要采用国际公认的、天地统一的坐标系。这样的坐标系有没有呢?当然有,那就是国际天球参考架 ICRS。关于天体测量的内容非常复杂,不过简单来说,我们日常使用的赤经赤纬依赖这个参考架,而地面上的坐标,例如 wgs84 体系的经纬度,也可以换算到这个参考系里。
-我们可以建立一个以地心为坐标原点,坐标轴**不**随地球自转的坐标系(也就是地心惯性坐标系ECI),观测站的坐标就是射线的端点,流星的赤经赤纬就是射线的方向向量。这样所有观测站的观测结果就可以统一了。
+我们可以建立一个以地心为坐标原点,坐标轴**不**随地球自转的坐标系(也就是地心惯性坐标系 ECI),观测站的坐标就是射线的端点,流星的赤经赤纬就是射线的方向向量。这样所有观测站的观测结果就可以统一了。
思路是这么个思路,实际怎么操作呢?
@@ -42,13 +42,13 @@
第二步,把像素坐标转化成天球坐标。这两个坐标的对应关系主要受两个因素影响,第一是相机镜头的畸变,第二是相机的指向。
-我们用最简单的近似(尤其对长焦的望远镜成立)来看,视场是x°,有y个像素宽,那么流星与画面中心的距离是z像素的话,那它离画面中心就是z(x/y)度。但对广角镜头来说,这个简单的关系并不完全成立。
+我们用最简单的近似(尤其对长焦的望远镜成立)来看,视场是 x°,有 y 个像素宽,那么流星与画面中心的距离是 z 像素的话,那它离画面中心就是 z(x/y)度。但对广角镜头来说,这个简单的关系并不完全成立。
一般来说,同一个物体在广角镜头的画面中心或边缘,它大小是不一样的,这就是所谓对的畸变。在画面的边缘,如果“底片比例尺”小于(x/y)的话,就是所谓的桶形畸变,如果大于,就是枕形畸变。
-
+
-
+
这些畸变的参数与镜头的光学设计有关,可能会包含在镜头的参数表里;但是也不能直接拿来用,因为实际的畸变还与镜头的安装方式有关:镜头的光轴稍微歪了一点,对焦距离不一样,这些参数就都会变。
@@ -66,8 +66,8 @@
而这么做还有一个隐藏假设:那就是两个站点的时间是精确同步的。我们说到对流星的视频观测时,其实不只是需要短曝光带来的高时间分辨率,还需要与之匹配的高时间精度。很遗憾,大多数爱好者器材并不能做到如此的时间精度。我认为,时间精度是在流星监测中长期被忽视的一个方面,而根据一些研究,时间的偏差会显著影响对流星定轨的精度。
-
+
一条流星的轨迹包含很多个点,如果我们对每个点都进行三位定位,就可以得出一条折线,这是各种误差造成的。而如果我们假设流星轨迹大致是一条直线,流星在这条直线上逐渐减速,这样就可以对整条轨迹进行拟合,得出的轨迹的误差就比单独每个点的误差小,因此持续时间长、数据点多的流星,定轨精度就更高。而此时,流星轨迹模型的选择就非常重要:近几年有一些文章[^1]指出,之前经常采用的一个模型并不非常合理。也有模型无关的定轨程序发布,在之后的文章中我们来详细解读。
-[^1]:[Estimating trajectories of meteors: an observational Monte Carlo approach – I. Theory](https://academic.oup.com/mnras/article/491/2/2688/5626361)
\ No newline at end of file
+[^1]: [Estimating trajectories of meteors: an observational Monte Carlo approach – I. Theory](https://academic.oup.com/mnras/article/491/2/2688/5626361)
diff --git a/docs/meteor/motivation.md b/docs/meteor/motivation.md
index b00c026..150b827 100644
--- a/docs/meteor/motivation.md
+++ b/docs/meteor/motivation.md
@@ -1,6 +1,6 @@
# 前言
-话说天上大势,合久必分,分久必合。6500万年前,一次陨石撞击导致了恐龙的灭绝;100多年前,发生在通古斯的神秘爆炸夷平了2000平方公里的森林;而差不多10年前,坠落在车里雅宾斯克的陨石也造成了几千人受伤。可见,小天体撞击地球的危险从古至今是真实存在的。
+话说天上大势,合久必分,分久必合。6500 万年前,一次陨石撞击导致了恐龙的灭绝;100 多年前,发生在通古斯的神秘爆炸夷平了 2000 平方公里的森林;而差不多 10 年前,坠落在车里雅宾斯克的陨石也造成了几千人受伤。可见,小天体撞击地球的危险从古至今是真实存在的。
小行星是广受各国关注的危险源。得益于大量投入,我们对地球周围的小行星有了越来越深刻的认识。科学家发现了大量近地小行星,推算了它们的轨道。结果还算是乐观:未来几十年地球受到小行星撞击的概率不算大。原本认为几十年后会撞地球的小行星,比如著名的“阿波菲斯”,它撞击地球的可能性也逐渐被排除[^1]。
@@ -8,55 +8,55 @@
那有什么办法可以提前发现这些彗星呢?监测流星!彗星上一次回归的时候会在轨道上散落一些碎屑,这些碎屑在彗星轨道上与本体逐渐拉开距离,于是就会有一些碎屑提前一段时间撞上地球。从地球上看,就是出现了新的流星雨。这种不寻常的流星雨,就可以提供杀手彗星蛛丝马迹。
-
+
于是,在地球表面建立流星监测网,就可以捕捉这样的流星雨,从而发现杀手彗星,完成从世界末日中拯救全人类的壮举——这份荣耀既属于运行设备的科学家,也属于听信了这个故事的金主。
上面这些论证基本来自于我前几天看到的一篇论文[^2]。是的,我能想象到你现在皱着眉头将信将疑的表情,因为我当时也是这样。不过我得承认,这个故事的质量远超过我之前各种报告,所以接下来我打算经常给别人讲这个故事。
-我从很早就开始对流星监控感兴趣。本科的时候我就在教学楼顶安装了一个流星摄像头,那时候跟大家一样使用UFOCapture这个软件,运行得很不错,中间还搞了流星雨直播和日常的慢直播。读研究生之后,机缘巧合,兜兜转转,又继续做流星了。
+我从很早就开始对流星监控感兴趣。本科的时候我就在教学楼顶安装了一个流星摄像头,那时候跟大家一样使用 UFOCapture 这个软件,运行得很不错,中间还搞了流星雨直播和日常的慢直播。读研究生之后,机缘巧合,兜兜转转,又继续做流星了。
-
+
-当年国内做流星监控的爱好者非常多,大家的设备基本都是WATEC-902H摄像头和它的变种,720×576的分辨率。后面几年,逐步更换成网络摄像头。这些摄像头原本用于安保,但对弱光的敏感度很不错,事实上摄像头用到的CMOS芯片和更贵的天文CMOS相机是同款,画质有保障。最开始有人自己买裸板组装网络摄像头,后来海康威视等品牌的摄像头占领市场之后,大家的设备慢慢就转换成了这种。如今的网络摄像头的功能比之前丰富得多,但很可惜,有些功能在监控流星时会适得其反。
+当年国内做流星监控的爱好者非常多,大家的设备基本都是 WATEC-902H 摄像头和它的变种,720×576 的分辨率。后面几年,逐步更换成网络摄像头。这些摄像头原本用于安保,但对弱光的敏感度很不错,事实上摄像头用到的 CMOS 芯片和更贵的天文 CMOS 相机是同款,画质有保障。最开始有人自己买裸板组装网络摄像头,后来海康威视等品牌的摄像头占领市场之后,大家的设备慢慢就转换成了这种。如今的网络摄像头的功能比之前丰富得多,但很可惜,有些功能在监控流星时会适得其反。
-我刚来国家天文台的时候,向老师请教一些技术细节,当我把手上的数据发给老师看的时候,老师立刻就问我,天文领域用的文件格式是fits,你发给我这个avi是怎么回事?原来,UFOCapture保存的只是适合肉眼观看的视频,并不能保存各种天文工具需要的fits格式。专业的天文学家不喜欢UFOCapture这个软件,但他们对数据的渴求是无止境的,大家经常提到流星监测网可以做各种各样的研究,这是非常大的激励。
+我刚来国家天文台的时候,向老师请教一些技术细节,当我把手上的数据发给老师看的时候,老师立刻就问我,天文领域用的文件格式是 fits,你发给我这个 avi 是怎么回事?原来,UFOCapture 保存的只是适合肉眼观看的视频,并不能保存各种天文工具需要的 fits 格式。专业的天文学家不喜欢 UFOCapture 这个软件,但他们对数据的渴求是无止境的,大家经常提到流星监测网可以做各种各样的研究,这是非常大的激励。
我尝试总结一下,对于爱好者来说,现在的流星监测技术栈还存在以下这些问题:
-* UFOCapture对摄像头的兼容依然不算好,网络摄像头需要用rtsp-OBS插件-UFO这样的转接方式,这个过程也十分消耗cpu算力;
-* 真正掌握UFOAnalyzer和UFoOrbiter对流星进行多站定轨的人还是很少,这两个软件汉化不完全、操作很复杂;
-* 这就导致,收集全国的流星数据,对流星进行常态化的定轨,还是非常困难,积累的数据通常只是以视频形式分散在爱好者各自的电脑中。
+- UFOCapture 对摄像头的兼容依然不算好,网络摄像头需要用 rtsp-OBS 插件-UFO 这样的转接方式,这个过程也十分消耗 cpu 算力;
+- 真正掌握 UFOAnalyzer 和 UFoOrbiter 对流星进行多站定轨的人还是很少,这两个软件汉化不完全、操作很复杂;
+- 这就导致,收集全国的流星数据,对流星进行常态化的定轨,还是非常困难,积累的数据通常只是以视频形式分散在爱好者各自的电脑中。
另一方面,从科学研究的视角,也提出了这些问题:
-* 现有的摄像头参数设置不正确,让流星视频“好看”的设置反而降低了数据质量;
-* 文件格式无法兼容,avi视频只能在UFO系列软件中使用,而不能导入天文学现有的工具链中进行深度处理;
-* 时间精度没有得到足够的重视,定轨时也会造成很大的误差。
+- 现有的摄像头参数设置不正确,让流星视频“好看”的设置反而降低了数据质量;
+- 文件格式无法兼容,avi 视频只能在 UFO 系列软件中使用,而不能导入天文学现有的工具链中进行深度处理;
+- 时间精度没有得到足够的重视,定轨时也会造成很大的误差。
-所以,我们不要忘记,UFOCapture是一个将近20年前的软件,它的很多设计,已经无法适应现在的技术水平和天文学生态圈了。观察世界上其他流星监测网,最近几年规模比较大的网络,无一例外都是采用了自研的软件,有些甚至是开源的。所以开发一套适应时代的流星软件很有必要。
+所以,我们不要忘记,UFOCapture 是一个将近 20 年前的软件,它的很多设计,已经无法适应现在的技术水平和天文学生态圈了。观察世界上其他流星监测网,最近几年规模比较大的网络,无一例外都是采用了自研的软件,有些甚至是开源的。所以开发一套适应时代的流星软件很有必要。
-这就是我研究生期间大部分时间做的事情。与UFO类似,我的软件也分成三部分,对应流星观测中的三个步骤:观测,测量和定轨。我们的硬件采用天文CMOS相机,也兼容网络摄像头,从发现流星开始,到最后得到流星体轨道,都可以自动完成。在2020年和2021年的双子座流星雨期间,我们的几套设备拍到了上千颗流星,对流星轨迹的测量精度也达到了很高水平,可以精确到几十米。这些工作就构成了我正在写的一篇论文。
+这就是我研究生期间大部分时间做的事情。与 UFO 类似,我的软件也分成三部分,对应流星观测中的三个步骤:观测,测量和定轨。我们的硬件采用天文 CMOS 相机,也兼容网络摄像头,从发现流星开始,到最后得到流星体轨道,都可以自动完成。在 2020 年和 2021 年的双子座流星雨期间,我们的几套设备拍到了上千颗流星,对流星轨迹的测量精度也达到了很高水平,可以精确到几十米。这些工作就构成了我正在写的一篇论文。
-
+
-但做到这还远远不够。如果用论文画上句点,我写的软件,还是会成为下一个UFO,这些东西会被束之高阁、最后无人问津。要把软件推广开,产生真正的科学数据,实现之前画所有的饼,还差最后一步。**这一步是一大步。**
+但做到这还远远不够。如果用论文画上句点,我写的软件,还是会成为下一个 UFO,这些东西会被束之高阁、最后无人问津。要把软件推广开,产生真正的科学数据,实现之前画所有的饼,还差最后一步。**这一步是一大步。**
-在技术大佬的强悍加持下,流星监控软件不再是一个单独的软件,而是和云端的服务器形成一个有机整体,数据和指令可以自由流动。这一切,正是流星监测的核心——多站。实际这就是前几年比较时髦的SaaS架构。
+在技术大佬的强悍加持下,流星监控软件不再是一个单独的软件,而是和云端的服务器形成一个有机整体,数据和指令可以自由流动。这一切,正是流星监测的核心——多站。实际这就是前几年比较时髦的 SaaS 架构。
-* 所有的流星监测站都是一个远程天文台。不用在本地的电脑上设置,只需在手机和其他电脑上登陆网页,就可以远程控制流星相机观测。还可以把自己的设备授权给朋友互相管理。
-* 主要面向天文CMOS相机,也兼容现在的网络摄像头。当然,我们希望大家使用更专业的设备,它们产生的数据质量更高。
-* 有丰富的可视化工具,可以生成“增强现实”的流星视频,可以直接导出竖屏视频;还有流星照片叠加成全景图,就像[这样](http://demo.meteoroid.fit/pano/album.html)。甚至还可以制作流星的[3D视频](https://www.bilibili.com/video/BV1QP4y177V2)。
-* 流星数据可以自动、实时地上传到服务器,与其他人的结果一起做多站定轨。这样,流星体的轨道、来源,还有未来预测陨石的落点,就都可以实现了。
-* 不只是流星,其他有趣的现象,比如人造卫星、飞机,以及精灵闪电,都可以得到兼顾。
+- 所有的流星监测站都是一个远程天文台。不用在本地的电脑上设置,只需在手机和其他电脑上登陆网页,就可以远程控制流星相机观测。还可以把自己的设备授权给朋友互相管理。
+- 主要面向天文 CMOS 相机,也兼容现在的网络摄像头。当然,我们希望大家使用更专业的设备,它们产生的数据质量更高。
+- 有丰富的可视化工具,可以生成“增强现实”的流星视频,可以直接导出竖屏视频;还有流星照片叠加成全景图,就像[这样](http://demo.meteoroid.fit/pano/album.html)。甚至还可以制作流星的[3D 视频](https://www.bilibili.com/video/BV1QP4y177V2)。
+- 流星数据可以自动、实时地上传到服务器,与其他人的结果一起做多站定轨。这样,流星体的轨道、来源,还有未来预测陨石的落点,就都可以实现了。
+- 不只是流星,其他有趣的现象,比如人造卫星、飞机,以及精灵闪电,都可以得到兼顾。
-
+
-陨石这一点非常有意思:我们可以做到流星视频在流星消失之后2秒就开始处理,计算单站流星坐标需要大概30秒,上传到服务器后,多站定轨算出轨迹需要大概10秒,然后再推算陨石落点。总的来说,在流星消失之后1分钟左右的时间里,就有可能计算出陨石的落点!要知道这时候陨石可能还没落地呢。“预警”陨石也算是我们的一个努力方向。
+陨石这一点非常有意思:我们可以做到流星视频在流星消失之后 2 秒就开始处理,计算单站流星坐标需要大概 30 秒,上传到服务器后,多站定轨算出轨迹需要大概 10 秒,然后再推算陨石落点。总的来说,在流星消失之后 1 分钟左右的时间里,就有可能计算出陨石的落点!要知道这时候陨石可能还没落地呢。“预警”陨石也算是我们的一个努力方向。
在接下来的文章中,我会逐渐详细解释我对流星监控的思考,但愿写到最后,我们最后的产品就可以跟大家见面了。
-[^1]:[NASA Analysis: Earth Is Safe From Asteroid Apophis for 100-Plus Years](https://www.nasa.gov/feature/jpl/nasa-analysis-earth-is-safe-from-asteroid-apophis-for-100-plus-years)
-[^2]:[Artificial intelligence techniques for automating the CAMS processing pipeline to direct the search for long-period comets](https://ui.adsabs.harvard.edu/abs/2018pimo.conf...65D/abstract)
\ No newline at end of file
+[^1]: [NASA Analysis: Earth Is Safe From Asteroid Apophis for 100-Plus Years](https://www.nasa.gov/feature/jpl/nasa-analysis-earth-is-safe-from-asteroid-apophis-for-100-plus-years)
+[^2]: [Artificial intelligence techniques for automating the CAMS processing pipeline to direct the search for long-period comets](https://ui.adsabs.harvard.edu/abs/2018pimo.conf...65D/abstract)
diff --git a/docs/meteor/networks.md b/docs/meteor/networks.md
index ccc7282..d1cb925 100644
--- a/docs/meteor/networks.md
+++ b/docs/meteor/networks.md
@@ -1,65 +1,60 @@
# 世界上的流星监测网络
-自60年代开始,世界各地曾经有许多流星监测网络,尤其在90-00年代,在加拿大、北美、日本和欧洲都有流星检测网在运行。流星监测网使用的相机也从胶片相机[^1]发展到模拟信号相机再到数字信号相机,分辨率和精度逐步提升。时至今日,世界上正在活跃的流星监测网络有GMN、CAMS、FRIPON等。
+自 60 年代开始,世界各地曾经有许多流星监测网络,尤其在 90-00 年代,在加拿大、北美、日本和欧洲都有流星检测网在运行。流星监测网使用的相机也从胶片相机[^1]发展到模拟信号相机再到数字信号相机,分辨率和精度逐步提升。时至今日,世界上正在活跃的流星监测网络有 GMN、CAMS、FRIPON 等。
-
+
这篇文章来自于我粗浅的文献调研,如有错误请不吝指出。其中有比较有趣的网络,例如澳大利亚沙漠火流星监测网,会单独写一遍文章来介绍。
-
## GMN[^2]
-GMN(Global meteor network)是现在规模最大的流星监测网络。项目2018年由Croatian Meteor Network为前身发起。项目的核心是使用开源硬件和软件建设低成本的流星监测站。网络使用树莓派和IMX290、IMX255等芯片的网络摄像头,配合为之开发的开源软件(RMS),可以实现低成本和快速推广。软件同时也输出兼容CAMS和UFO Orbit的数据。至2021年,网络包含20个国家的共450个站点,共获得220000条流星轨道。
+GMN(Global meteor network)是现在规模最大的流星监测网络。项目 2018 年由 Croatian Meteor Network 为前身发起。项目的核心是使用开源硬件和软件建设低成本的流星监测站。网络使用树莓派和 IMX290、IMX255 等芯片的网络摄像头,配合为之开发的开源软件(RMS),可以实现低成本和快速推广。软件同时也输出兼容 CAMS 和 UFO Orbit 的数据。至 2021 年,网络包含 20 个国家的共 450 个站点,共获得 220000 条流星轨道。
-
+
## CAMS[^3]
-CAMS(California All-sky Meteor Surveillance System)是一个历史较为悠久的流星监测网,开始于2000年前后。在2010年,CAMS推出了新的相机硬件设计,使用多个模拟信号摄像头组成阵列覆盖全天,每个摄像头的分辨率为22°×29°。数据格式使用Croatian Meteor Network开发的压缩格式。观测时将整夜的数据进行压缩存盘,再一同处理。
+CAMS(California All-sky Meteor Surveillance System)是一个历史较为悠久的流星监测网,开始于 2000 年前后。在 2010 年,CAMS 推出了新的相机硬件设计,使用多个模拟信号摄像头组成阵列覆盖全天,每个摄像头的分辨率为 22°×29°。数据格式使用 Croatian Meteor Network 开发的压缩格式。观测时将整夜的数据进行压缩存盘,再一同处理。
-
+
## FRIPON[^4]
-FRIPON(Fireball Recovery and InterPlanetary Observation Network)是主要活跃于欧洲的流星监测网络。至2020年,已经有105个光学站点和25个无线电站点。硬件方面也使用低成本计算机和网络摄像头,使用鱼眼相机覆盖全天。软件方面使用单独开发的Freeture探测流星。由于硬件限制,极限星等不高,专注于较亮的火流星。至2020年,探测到4000颗流星。
-
+FRIPON(Fireball Recovery and InterPlanetary Observation Network)是主要活跃于欧洲的流星监测网络。至 2020 年,已经有 105 个光学站点和 25 个无线电站点。硬件方面也使用低成本计算机和网络摄像头,使用鱼眼相机覆盖全天。软件方面使用单独开发的 Freeture 探测流星。由于硬件限制,极限星等不高,专注于较亮的火流星。至 2020 年,探测到 4000 颗流星。
-
+
+
+
## UFOCAPTURE[^5]
-SonotaCo是一个日本的资深爱好者,开发了著名的UFOCapture软件,被诸多小型流星监测网和爱好者使用。但这个软件是闭源收费软件,因此也造成大型流星监测网都使用独立开发的开源软件。这些软件的性能经常与UFO软件相对比。配套的UFOOrbit软件是免费的,因此更广泛地应用于流星定轨,很多流星监测网也提供兼容的数据产品。
-
+SonotaCo 是一个日本的资深爱好者,开发了著名的 UFOCapture 软件,被诸多小型流星监测网和爱好者使用。但这个软件是闭源收费软件,因此也造成大型流星监测网都使用独立开发的开源软件。这些软件的性能经常与 UFO 软件相对比。配套的 UFOOrbit 软件是免费的,因此更广泛地应用于流星定轨,很多流星监测网也提供兼容的数据产品。
+
+
## DFN[^6]
-澳大利亚沙漠火流星监测网(Australian Desert Fireball Network)是专注于寻找陨石的火流星监测网络,与其他使用视频摄像头的网络不同,DFN使用单反相机和液晶快门进行流星监测。虽然无法探测暗流星,但足够进行火流星和陨石轨迹的观测。2015和2016年各找到一颗1公斤级的陨石。
+澳大利亚沙漠火流星监测网(Australian Desert Fireball Network)是专注于寻找陨石的火流星监测网络,与其他使用视频摄像头的网络不同,DFN 使用单反相机和液晶快门进行流星监测。虽然无法探测暗流星,但足够进行火流星和陨石轨迹的观测。2015 和 2016 年各找到一颗 1 公斤级的陨石。
-* 详细解读:[澳大利亚沙漠火流星监测网](DFN.md)
+- 详细解读:[澳大利亚沙漠火流星监测网](DFN.md)
-
+
-
+
## 一些不活跃的流星网
-* IMONET:至2014年,有450000条流星数据
-* SLOVAK VIDEO METEOR NETWORK:使用像增强器,极限星等很高,但成本也很高,只有两个站点
-* North American Meteor Network:爱好者组织,没找到成果发表
-* Tokyo Meteor Network:活跃于90年代
-* Mexican Meteor Network:一个2016年提出的计划,依然采用模拟信号摄像头,有些落后时代
-* Sri Lanka Meteor Network:没有成果发表
-* ASGARD All-Sky Camera Network:加拿大的5个站点,使用模拟信号摄像头,极限星等+1
-
-[^1]:[The autonomous all-sky photographic camera for meteor observation](https://ui.adsabs.harvard.edu/abs/2002ESASP.500..257S/abstract)
-
-[^2]:[The Global Meteor Network -- Methodology and First Results](https://arxiv.org/abs/2107.12335)
-
-[^3]:[CAMS: Cameras for Allsky Meteor Surveillance to establish minor meteor showers](https://www.sciencedirect.com/science/article/pii/S0019103511003290)
-
-[^4]:[FRIPON: A worldwide network to track incoming meteoroids](https://www.aanda.org/articles/aa/full_html/2020/12/aa38649-20/aa38649-20.html)
-
-[^5]:[SonotaCo - UFOCapture](http://sonotaco.com/soft/e_index.html)
-
-[^6]:[How to build a continental scale fireball camera network](https://link.springer.com/article/10.1007/s10686-017-9532-7)
+- IMONET:至 2014 年,有 450000 条流星数据
+- SLOVAK VIDEO METEOR NETWORK:使用像增强器,极限星等很高,但成本也很高,只有两个站点
+- North American Meteor Network:爱好者组织,没找到成果发表
+- Tokyo Meteor Network:活跃于 90 年代
+- Mexican Meteor Network:一个 2016 年提出的计划,依然采用模拟信号摄像头,有些落后时代
+- Sri Lanka Meteor Network:没有成果发表
+- ASGARD All-Sky Camera Network:加拿大的 5 个站点,使用模拟信号摄像头,极限星等+1
+[^1]: [The autonomous all-sky photographic camera for meteor observation](https://ui.adsabs.harvard.edu/abs/2002ESASP.500..257S/abstract)
+[^2]: [The Global Meteor Network -- Methodology and First Results](https://arxiv.org/abs/2107.12335)
+[^3]: [CAMS: Cameras for Allsky Meteor Surveillance to establish minor meteor showers](https://www.sciencedirect.com/science/article/pii/S0019103511003290)
+[^4]: [FRIPON: A worldwide network to track incoming meteoroids](https://www.aanda.org/articles/aa/full_html/2020/12/aa38649-20/aa38649-20.html)
+[^5]: [SonotaCo - UFOCapture](http://sonotaco.com/soft/e_index.html)
+[^6]: [How to build a continental scale fireball camera network](https://link.springer.com/article/10.1007/s10686-017-9532-7)
diff --git a/docs/meteor/photon_to_digit.md b/docs/meteor/photon_to_digit.md
index 02a5ae8..a4bfa80 100644
--- a/docs/meteor/photon_to_digit.md
+++ b/docs/meteor/photon_to_digit.md
@@ -2,7 +2,7 @@
光从各种光源发出来,经过遥远的距离,再经过镜头或者人眼的折射,落在传感器或者视网膜上。人眼和摄像头目的都是一样的:测量来自这束光的亮度。尤其是摄像头,它会把光的亮度转化成数字,而显示器再把数字再转化回亮度,这我们就能在屏幕上见到摄像头拍到的画面了。
-有一个基本的物理事实:一束光,并不是“连续”的。我们知道光子的概念,光的能量是一份一份传播的,而相机也是对落在上面的光子进行计数。对于老式的胶片相机,光子会导致银盐颗粒发生分解,然后通过各种化学反应变成颜色的深度。现在大家常用的CCD、CMOS相机,传感器是由半导体组成的,光子落在上面会激发出电子,从而将光子数变成了更容易测量的电子数。然后经过放大、模数转换,就变成了可以传输和储存的数字。
+有一个基本的物理事实:一束光,并不是“连续”的。我们知道光子的概念,光的能量是一份一份传播的,而相机也是对落在上面的光子进行计数。对于老式的胶片相机,光子会导致银盐颗粒发生分解,然后通过各种化学反应变成颜色的深度。现在大家常用的 CCD、CMOS 相机,传感器是由半导体组成的,光子落在上面会激发出电子,从而将光子数变成了更容易测量的电子数。然后经过放大、模数转换,就变成了可以传输和储存的数字。
在这个过程中,总会产生一部分噪声。所谓噪声,就是测量结果相对原始值的偏离,而尽可能降低噪声,才可以得到高质量的画面。有个概念就是信噪比,顾名思义,信噪比就是信号/噪声。只要尽力降低噪声,信噪比就越高,测量结果就越好。
@@ -12,23 +12,23 @@
## 数光子
-刚才我们说了,相机传感器可以对落在上面的光子进行计数。而光子的数量,本身就带有随机性,而随机性就会带来噪声。平时我们不会注意到这种随机性,因为白天或者灯光下光子数量很多,随机性被抹掉了,而在拍摄星空时,光子的数量很少,这种效应就很明显。我们进行一点计算就会发现,对于我们用肉眼观察6等的恒星,每秒钟进入我们眼中的光子数量只有10个左右!对于跟人眼尺寸差不多的摄像头,这个数字也差不多。可见人眼还是一台很不错的相机。
+刚才我们说了,相机传感器可以对落在上面的光子进行计数。而光子的数量,本身就带有随机性,而随机性就会带来噪声。平时我们不会注意到这种随机性,因为白天或者灯光下光子数量很多,随机性被抹掉了,而在拍摄星空时,光子的数量很少,这种效应就很明显。我们进行一点计算就会发现,对于我们用肉眼观察 6 等的恒星,每秒钟进入我们眼中的光子数量只有 10 个左右!对于跟人眼尺寸差不多的摄像头,这个数字也差不多。可见人眼还是一台很不错的相机。
-关于“光子”为什么会带有这种天然的噪声,我们用一个日常生活中的场景来类比。我们在公交站等公交车,对于10分钟一班的车,有时候两辆车的间隔会是15分钟,有时候又是10分钟。而如果一班车我们不知道发车频率,我们可以在公交站边等边算时间,用这个时间间隔来估算。
+关于“光子”为什么会带有这种天然的噪声,我们用一个日常生活中的场景来类比。我们在公交站等公交车,对于 10 分钟一班的车,有时候两辆车的间隔会是 15 分钟,有时候又是 10 分钟。而如果一班车我们不知道发车频率,我们可以在公交站边等边算时间,用这个时间间隔来估算。
-
+
-如果我们在公交站等了10分钟,这10分钟一共来了1辆车,那这辆车的发车间隔可能是多少?当然最佳估计就是10分钟一辆(每小时6班),但完全有可能是15分钟1辆(每小时4班),也很有可能是5分钟一辆(每小时12班)。这种时候你就非常拿不准这个发车频率。
+如果我们在公交站等了 10 分钟,这 10 分钟一共来了 1 辆车,那这辆车的发车间隔可能是多少?当然最佳估计就是 10 分钟一辆(每小时 6 班),但完全有可能是 15 分钟 1 辆(每小时 4 班),也很有可能是 5 分钟一辆(每小时 12 班)。这种时候你就非常拿不准这个发车频率。
-而如果你在站台上等了两个小时,等到了12辆车,那你说这趟车是每小时6辆的把握就大得多了。每小时8班、每小时5班的概率都大大降低。如果你等的时间更久,等了整整一天,你对发车频率的测量就更有把握了。
+而如果你在站台上等了两个小时,等到了 12 辆车,那你说这趟车是每小时 6 辆的把握就大得多了。每小时 8 班、每小时 5 班的概率都大大降低。如果你等的时间更久,等了整整一天,你对发车频率的测量就更有把握了。
-这个例子就表明,“一个一个”随机出现的事件,对出现概率的测量是随着出现次数增加逐渐变精确的。在数学上,这就是所谓的“泊松噪声”。它的大小等于光子的平方根,比如100个光子,泊松噪声的水平是10个光子,此时信噪比是10,而10000个光子,泊松噪声是100个光子,信噪比是100。
+这个例子就表明,“一个一个”随机出现的事件,对出现概率的测量是随着出现次数增加逐渐变精确的。在数学上,这就是所谓的“泊松噪声”。它的大小等于光子的平方根,比如 100 个光子,泊松噪声的水平是 10 个光子,此时信噪比是 10,而 10000 个光子,泊松噪声是 100 个光子,信噪比是 100。
-这基本就是为什么越暗的星就越难拍到。并且3s/ISO5000曝光拍出来的照片明显不如30s/ISO500,也是这个原因。在这个问题上是没法作弊的,比如我问:我把每个光子都转变成100个计数,100个光子跟以前10000个光子一样亮了,噪声会减小吗?并不会,因为这时候噪声是被等比例放大了。就像是数公交车的时候,每过一辆车就在本子上记100,最后没有什么区别。
+这基本就是为什么越暗的星就越难拍到。并且 3s/ISO5000 曝光拍出来的照片明显不如 30s/ISO500,也是这个原因。在这个问题上是没法作弊的,比如我问:我把每个光子都转变成 100 个计数,100 个光子跟以前 10000 个光子一样亮了,噪声会减小吗?并不会,因为这时候噪声是被等比例放大了。就像是数公交车的时候,每过一辆车就在本子上记 100,最后没有什么区别。
如下图,[这篇文章](https://petapixel.com/2017/03/22/find-best-iso-astrophotography-dynamic-range-noise/)[^2]给出的例子中,虽然后期被拉到相同的亮度,曝光短的照片明显噪声更大。
-
+
## 暗电流和背景天光
@@ -38,51 +38,47 @@
暗电流是另一方面。理论上,只要温度不是绝对零度,都会有一些电子自发地跳出来。于是即使没有光子照射,拍出来画面也是有计数的,并且正比于曝光时间。
-之所以把它们合在一起写,是因为他们观测上产生的效果是差不多的:就是随曝光时间均匀增加的计数。问题来了:这些计数也有泊松噪声。深空摄影中经常会使用“暗场”来去掉图像中的暗电流,而拍摄星野也可以用ps减掉背景天光,虽然本身减掉了,但他们的噪声依然存在,这样总和的噪声就变大了。
+之所以把它们合在一起写,是因为他们观测上产生的效果是差不多的:就是随曝光时间均匀增加的计数。问题来了:这些计数也有泊松噪声。深空摄影中经常会使用“暗场”来去掉图像中的暗电流,而拍摄星野也可以用 ps 减掉背景天光,虽然本身减掉了,但他们的噪声依然存在,这样总和的噪声就变大了。
-我们修改一下数公交车的场景,除了你要数的那趟公交车之外,还有每小时60班其他公交车经过这个站,你数了10分钟,总共确实数到11辆。按理说应该扣掉10辆其他的公交车,但问题是真的正好经过了10辆其他公交车吗?也有可能是9+2辆或者11+0辆,那你对目标的计数就差了非常非常多,没有精度可言了。
+我们修改一下数公交车的场景,除了你要数的那趟公交车之外,还有每小时 60 班其他公交车经过这个站,你数了 10 分钟,总共确实数到 11 辆。按理说应该扣掉 10 辆其他的公交车,但问题是真的正好经过了 10 辆其他公交车吗?也有可能是 9+2 辆或者 11+0 辆,那你对目标的计数就差了非常非常多,没有精度可言了。
-光子数量也是一样的。本来100个来自目标的光子可以带来10的信噪比,但如果又有了800个光子的背景天光,一共900个光子,那么噪声就是30光子,信噪比就只剩3.33了。这就是为什么天文观测一定要寻找光污染最小的地方,还有CCD需要制冷来降低暗电流,就是因为它们带来的噪声是无法去除的。
+光子数量也是一样的。本来 100 个来自目标的光子可以带来 10 的信噪比,但如果又有了 800 个光子的背景天光,一共 900 个光子,那么噪声就是 30 光子,信噪比就只剩 3.33 了。这就是为什么天文观测一定要寻找光污染最小的地方,还有 CCD 需要制冷来降低暗电流,就是因为它们带来的噪声是无法去除的。
唯一能去除的方法就是不要让这些额外的光子到达传感器。比如有“光害滤镜”这种产品,把一部分天光滤掉,这样就可以出现在城市里拍银河的神片了。
-
+
## 读出噪声
-图像传感器是如何将光子转换成电子的?可以从一个PN结开始理解。我们给PN结通上反向偏压,此时几乎没有电流,是因为PN结上形成了一个势垒,电子能量不够不能通过。但这时如果有一个光子撞到一个电子,电子受到了激发,就会越过势垒跑到另一边,于是就形成了光电流。光子和电子的相互作用是一对一的,也就是说,电子的数量就代表着光子的数量,它们的比值就是大名鼎鼎的量子效率。通常量子效率小于100%,但厂商都在朝这个方向努力,最好的CMOS芯片已经达到90%以上。
+图像传感器是如何将光子转换成电子的?可以从一个 PN 结开始理解。我们给 PN 结通上反向偏压,此时几乎没有电流,是因为 PN 结上形成了一个势垒,电子能量不够不能通过。但这时如果有一个光子撞到一个电子,电子受到了激发,就会越过势垒跑到另一边,于是就形成了光电流。光子和电子的相互作用是一对一的,也就是说,电子的数量就代表着光子的数量,它们的比值就是大名鼎鼎的量子效率。通常量子效率小于 100%,但厂商都在朝这个方向努力,最好的 CMOS 芯片已经达到 90%以上。
-而产生的光电子十分珍贵,不能让它白白溜走。这些电子暂存在PN结的另一边,这里相当于一个电容。在曝光的时候电子逐渐增多,这就是为什么图像亮度正比于曝光时间。而在曝光结束之后,一个特殊的“开关”打开,这些电子可以通过另一条通路流走,这就是所谓的读出。
+而产生的光电子十分珍贵,不能让它白白溜走。这些电子暂存在 PN 结的另一边,这里相当于一个电容。在曝光的时候电子逐渐增多,这就是为什么图像亮度正比于曝光时间。而在曝光结束之后,一个特殊的“开关”打开,这些电子可以通过另一条通路流走,这就是所谓的读出。
- [^3]
+ [^3]
在这个电路上,有几个环节会造成噪声。光电子在沿着导线读出来的时候,最终出来的电子有可能会多几个少几个,这是因为导线中自带的电子也会热运动,所以有一些随机性。这种噪声叫做热噪声,遵循高斯分布,是一种“白噪声”。另一个是电子在经过各种门电路的时候,因为半导体的缺陷,有时候会“卡住”,过一段时间才释放出来,这叫做“闪烁”噪声,是一种低频噪声。这两种噪声可以认为与曝光时间无关,每次读出产生的噪声水平是差不多的。
-这些转移出来的光电子,会经过放大电路进行扩增(“增益”),然后流过ADC。这时电子的数量就会被记录下来,成为一个个代表亮度的数字(叫做ADU值)。ADU输出的是一个固定位数的整数,就是我们常说的“位宽”或“位深”,例如12-bit的CMOS芯片意味着它的ADU可以输出12-bit整数,取值范围是0-4095。而16-bit的CCD,输出的是0-65535的整数。如果电子太多超过了上述的范围,输出的结果就不会再高了,而是停在4095或65535,这就是所谓的过曝。
+这些转移出来的光电子,会经过放大电路进行扩增(“增益”),然后流过 ADC。这时电子的数量就会被记录下来,成为一个个代表亮度的数字(叫做 ADU 值)。ADU 输出的是一个固定位数的整数,就是我们常说的“位宽”或“位深”,例如 12-bit 的 CMOS 芯片意味着它的 ADU 可以输出 12-bit 整数,取值范围是 0-4095。而 16-bit 的 CCD,输出的是 0-65535 的整数。如果电子太多超过了上述的范围,输出的结果就不会再高了,而是停在 4095 或 65535,这就是所谓的过曝。
-除了ADU导致的过曝之外,其实前一步像素中储存的电子数也是有上限的。电容靠电压来吸住电荷,而如果电荷非常多,电容两边的电压就会变高,进而降低了PN结两边的偏压。所以因为PN结是单向导电的,一旦偏压消失,新来的电子就会重新通过PN结溜走。所以,每个像素能储存的电子数是有限的,这就是所谓的“满阱”。对于CCD来说,这些多余的电子会外溢到相邻的像素中,这就是CCD特有的smearing(漏光)现象。
+除了 ADU 导致的过曝之外,其实前一步像素中储存的电子数也是有上限的。电容靠电压来吸住电荷,而如果电荷非常多,电容两边的电压就会变高,进而降低了 PN 结两边的偏压。所以因为 PN 结是单向导电的,一旦偏压消失,新来的电子就会重新通过 PN 结溜走。所以,每个像素能储存的电子数是有限的,这就是所谓的“满阱”。对于 CCD 来说,这些多余的电子会外溢到相邻的像素中,这就是 CCD 特有的 smearing(漏光)现象。
- [^4]
+ [^4]
-最后,ADU在对电子计数时,因为只能输出整数,那么在取整时也会造成一些噪声。如果ADC把每10个电子算作一个ADU,0电子是0ADU,那么其实5-14电子都会当做1,而15-24都会当做2。所以平均来看,测量结果与实际的电子数有一定出入,这就是所谓的量化噪声。但是如果把1个电子算作一个ADU,1就是1,2就是2,那这种噪声就不存在了。因此,增益(单位是e/ADU,这个值与大家日常用的增益值相反,增益越大图像越暗)越大,量化噪声就越大。
+最后,ADU 在对电子计数时,因为只能输出整数,那么在取整时也会造成一些噪声。如果 ADC 把每 10 个电子算作一个 ADU,0 电子是 0ADU,那么其实 5-14 电子都会当做 1,而 15-24 都会当做 2。所以平均来看,测量结果与实际的电子数有一定出入,这就是所谓的量化噪声。但是如果把 1 个电子算作一个 ADU,1 就是 1,2 就是 2,那这种噪声就不存在了。因此,增益(单位是 e/ADU,这个值与大家日常用的增益值相反,增益越大图像越暗)越大,量化噪声就越大。
-总结一下:在读出过程中,发生在像素内部的噪声主要有热噪声、闪烁噪声、量化噪声等,这些噪声来源构成了所谓的“读出噪声”。因为读出噪声的存在,有时候ADU测量出的电子数有可能是负值,但因为输出数据不能是负的,所以会截断成0。与过曝一样,这种截断也会造成图像的失真,所以会有所谓的“偏置”设置来将ADC的零点稍稍提升,让无光照对应一个非零的ADU值。这个偏置值在处理图像时也需要减掉,这就是所谓的“偏置场”。
+总结一下:在读出过程中,发生在像素内部的噪声主要有热噪声、闪烁噪声、量化噪声等,这些噪声来源构成了所谓的“读出噪声”。因为读出噪声的存在,有时候 ADU 测量出的电子数有可能是负值,但因为输出数据不能是负的,所以会截断成 0。与过曝一样,这种截断也会造成图像的失真,所以会有所谓的“偏置”设置来将 ADC 的零点稍稍提升,让无光照对应一个非零的 ADU 值。这个偏置值在处理图像时也需要减掉,这就是所谓的“偏置场”。
## 像素间的不均匀性
-天文摄影中“除平场”的操作大家肯定不陌生,这个操作就与像素间的不均匀性有关。因为制造工艺的限制,每个像素对光的相应不是完全一样的,对于电路复杂的CMOS来说尤其如此。CMOS标称的量子效率、增益是一个平均值,其实不同的像素量子效率和增益会有所不同,并且每一行或每一列也会有集体的偏离。这些就使画面整体出现一个固定的噪声,就是所谓的固定模式噪声(PRNU)。好在这种噪声是固定的,在观测前后拍摄平场就可以修正。
+天文摄影中“除平场”的操作大家肯定不陌生,这个操作就与像素间的不均匀性有关。因为制造工艺的限制,每个像素对光的相应不是完全一样的,对于电路复杂的 CMOS 来说尤其如此。CMOS 标称的量子效率、增益是一个平均值,其实不同的像素量子效率和增益会有所不同,并且每一行或每一列也会有集体的偏离。这些就使画面整体出现一个固定的噪声,就是所谓的固定模式噪声(PRNU)。好在这种噪声是固定的,在观测前后拍摄平场就可以修正。
- [^3]
+ [^3]
-平场的原理就是:拍摄一个已知均匀的发光体,借此凸显像素间的不确定性。假如拍摄平场时,一个像素拍到了110而相邻的像素拍到了90,拍摄目标时前一个像素拍到了190而后一个像素拍到了250,那么两个像素实际的值就分别是190/110×100和250/90×100。
+平场的原理就是:拍摄一个已知均匀的发光体,借此凸显像素间的不确定性。假如拍摄平场时,一个像素拍到了 110 而相邻的像素拍到了 90,拍摄目标时前一个像素拍到了 190 而后一个像素拍到了 250,那么两个像素实际的值就分别是 190/110×100 和 250/90×100。
-除此之外,相同温度下每个像素暗电流的大小也是不同的,因此也有对应的固定模式噪声。CMOS芯片中很常见一种暗电流很高的坏像素,曝光时间一长这种像素很快就饱和了,所以在长曝光照片中表现为恒亮的坏像素。
+除此之外,相同温度下每个像素暗电流的大小也是不同的,因此也有对应的固定模式噪声。CMOS 芯片中很常见一种暗电流很高的坏像素,曝光时间一长这种像素很快就饱和了,所以在长曝光照片中表现为恒亮的坏像素。
-
-[^1]:[Image Sensor Noise Sources](https://www.youtube.com/playlist?list=PLD9DE4E7DCC55AB4C)
-
-[^2]:[How to Find the Best ISO for Astrophotography: Dynamic Range and Noise](https://petapixel.com/2017/03/22/find-best-iso-astrophotography-dynamic-range-noise/)
-
-[^3]:[Review of CMOS image sensors](https://www.sciencedirect.com/science/article/pii/S0026269205002764)
-
-[^4]:[File:Vertical smear.jpg](https://commons.wikimedia.org/wiki/File:Vertical_smear.jpg)
\ No newline at end of file
+[^1]: [Image Sensor Noise Sources](https://www.youtube.com/playlist?list=PLD9DE4E7DCC55AB4C)
+[^2]: [How to Find the Best ISO for Astrophotography: Dynamic Range and Noise](https://petapixel.com/2017/03/22/find-best-iso-astrophotography-dynamic-range-noise/)
+[^3]: [Review of CMOS image sensors](https://www.sciencedirect.com/science/article/pii/S0026269205002764)
+[^4]: [File:Vertical smear.jpg](https://commons.wikimedia.org/wiki/File:Vertical_smear.jpg)
diff --git a/docs/meteor/wrong_settings.md b/docs/meteor/wrong_settings.md
index c180c3d..d5f0032 100644
--- a/docs/meteor/wrong_settings.md
+++ b/docs/meteor/wrong_settings.md
@@ -6,13 +6,13 @@
不过有意思的是,本来用于安保的网络摄像头很早就提供了“降噪”功能。只要打开降噪功能,晚上的画面立刻就变得清晰了许多,本来噪声密布的夜空瞬间安静了下来,很多本来看不到的星星也浮现了出来。这是怎么做到的?难道安保相机有一些不为人知的算法?为什么这样的技术没有应用在天文领域呢?不知道你有没有注意到这一点:虽然画面变“好看”了,拍到的流星好像并没有增多。实际上,“降噪”也并不是没有代价的。
-
+
本文就来讨论一下网络摄像头的一些错误设置,从原理出发,分析这些设置为什么管用、又为什么有害。
## 降噪
-我们先来看两段流星视频样本。第一个样本开启了刚才说的“降噪”功能,第二个是CMOS相机输出的原始视频,没有经过处理。两段视频的观感非常不同。
+我们先来看两段流星视频样本。第一个样本开启了刚才说的“降噪”功能,第二个是 CMOS 相机输出的原始视频,没有经过处理。两段视频的观感非常不同。


@@ -21,15 +21,15 @@
上一篇文章里我们讲过,在恒星、流星这样的亮度范围,光子的泊松噪声非常明显,它受数学规律支配,与设备无关。既然如此,第一段视频里噪声是怎么去除的?其实道理非常简单,那就是取平均。
-例如上篇文章中讲的数公交车的场景,如果只数10分钟,噪声就非常大,而如果数了2小时,噪声就比较小了。而如果我们数了12个10分钟,然后把结果取平均,其实相当于数了两个小时,所以平均到10分钟之内,噪声水平就比之前小了很多。顺带说一句,这就是深空摄影中“叠加降噪”的手法,多张照片叠加就相当于累积了曝光时间,所以可以得到很高的信噪比。
+例如上篇文章中讲的数公交车的场景,如果只数 10 分钟,噪声就非常大,而如果数了 2 小时,噪声就比较小了。而如果我们数了 12 个 10 分钟,然后把结果取平均,其实相当于数了两个小时,所以平均到 10 分钟之内,噪声水平就比之前小了很多。顺带说一句,这就是深空摄影中“叠加降噪”的手法,多张照片叠加就相当于累积了曝光时间,所以可以得到很高的信噪比。
-而我们的摄像头,也是采用这种“天文”方法来降噪。单帧的图像噪声太大不好看?那就把每一帧都跟之前10帧取平均值。受益的场景其实是夜间的安保:现在每一帧都相当于10帧的长曝光,如果画面中大部分是静止的景物,这样的叠加降噪可以大大提升清晰度,这样作为卖点会非常吸引顾客。而出现小偷毕竟只是小概率事件,大部分时候值班员盯着一个干净的监控画面会感到心情非常舒畅。
+而我们的摄像头,也是采用这种“天文”方法来降噪。单帧的图像噪声太大不好看?那就把每一帧都跟之前 10 帧取平均值。受益的场景其实是夜间的安保:现在每一帧都相当于 10 帧的长曝光,如果画面中大部分是静止的景物,这样的叠加降噪可以大大提升清晰度,这样作为卖点会非常吸引顾客。而出现小偷毕竟只是小概率事件,大部分时候值班员盯着一个干净的监控画面会感到心情非常舒畅。
-但是对移动的目标这样做问题就很大了。尤其是流星,速度飞快,你取平均跟谁取呢?只能与流星出现之前的10帧取平均,但是那些画面里又没有流星。那流星的信号实际上是被削弱了。另外,流星飞过后的地方,本来只有天空背景,但却被平均进了刚飞过的流星的亮度,也变得很亮,所以流星就有了长长的尾巴。
+但是对移动的目标这样做问题就很大了。尤其是流星,速度飞快,你取平均跟谁取呢?只能与流星出现之前的 10 帧取平均,但是那些画面里又没有流星。那流星的信号实际上是被削弱了。另外,流星飞过后的地方,本来只有天空背景,但却被平均进了刚飞过的流星的亮度,也变得很亮,所以流星就有了长长的尾巴。

-上图是一个假想的像素接收到的亮度曲线。原始数据是蓝线,流星经过这个像素的时间很短,只有4帧,体现为一个尖峰,而噪声比较大。如果我们把每个点都与之前10个点取平均,结果就是橙线。可以看到,噪声大大降低,但是流星的峰值变低了,持续时间却变长了。并且,流星出现的时间整体比实际更晚。
+上图是一个假想的像素接收到的亮度曲线。原始数据是蓝线,流星经过这个像素的时间很短,只有 4 帧,体现为一个尖峰,而噪声比较大。如果我们把每个点都与之前 10 个点取平均,结果就是橙线。可以看到,噪声大大降低,但是流星的峰值变低了,持续时间却变长了。并且,流星出现的时间整体比实际更晚。
那么,开启了降噪设置进行流星监测有什么坏处呢?首先,这种设置并不能增加拍到的流星数。叠加降噪只对静止的天体管用,所以我们看到恒星的数量变多了;但是经过平均,流星的亮度降低了,也分散了。很多人都说降噪功能可以增加极限星等,对用来测极限星等的恒星来说不假,但是对流星的极限星等并没有增加。
@@ -39,15 +39,15 @@
这些设置基本来自于另一个需求:增加流星的“显眼”程度,让比暗的流星也有比较好的视觉效果。主要有两点:通过“增益”设置增加摄像头的感光度,提升对暗弱光线的响应能力;以及亮度和对比度设置,压低天光背景,提亮流星的亮度。
-
+
-这里的错误设置其实比较隐蔽,在天文的其他领域不常遇到,容我慢慢道来。上篇文章我们说到,增益就是光电子和ADU的比值,这个比值是可以设置的。如果设置的比较大,一个光电子对应的ADU就更多,画面就更亮。一般天文观测中,常常把CCD设置成一个电子对应一个ADU,或者多个电子对应一个ADU。但是对于流星观测,曝光时间非常短,所以电子数很少(可能只有几个十几个),所以我们不由自主得把增益设置得非常高,这时候,一个电子就会对应好几个ADU。
+这里的错误设置其实比较隐蔽,在天文的其他领域不常遇到,容我慢慢道来。上篇文章我们说到,增益就是光电子和 ADU 的比值,这个比值是可以设置的。如果设置的比较大,一个光电子对应的 ADU 就更多,画面就更亮。一般天文观测中,常常把 CCD 设置成一个电子对应一个 ADU,或者多个电子对应一个 ADU。但是对于流星观测,曝光时间非常短,所以电子数很少(可能只有几个十几个),所以我们不由自主得把增益设置得非常高,这时候,一个电子就会对应好几个 ADU。
-这样做有什么问题呢?分析两种情况。不考虑其他噪声,假设我们相机的ADC是8位的,它可以输出的值为0-255。第一种设置,增益为较低的1e/ADU(这个单位与相机控制页面的设置是相反的),那么他能拍到的最暗的亮度就是1ADU,对应1个电子,最亮就是255ADU,255个电子,相差255倍。第二种设置,增益设置为0.2e/ADU,那么最暗就成了5ADU,1个电子,最亮还是255ADU,只对应51个电子,最亮和最暗只差51倍。电子数多于51,ADU值也无法继续增加了。这个最亮最暗相差多少倍,就是摄影中常说的“动态范围”,高感降低了动态范围。
+这样做有什么问题呢?分析两种情况。不考虑其他噪声,假设我们相机的 ADC 是 8 位的,它可以输出的值为 0-255。第一种设置,增益为较低的 1e/ADU(这个单位与相机控制页面的设置是相反的),那么他能拍到的最暗的亮度就是 1ADU,对应 1 个电子,最亮就是 255ADU,255 个电子,相差 255 倍。第二种设置,增益设置为 0.2e/ADU,那么最暗就成了 5ADU,1 个电子,最亮还是 255ADU,只对应 51 个电子,最亮和最暗只差 51 倍。电子数多于 51,ADU 值也无法继续增加了。这个最亮最暗相差多少倍,就是摄影中常说的“动态范围”,高感降低了动态范围。
-这样暗的目标确实显得更亮了,但是相机对亮暗的分辨能力却降低了。第一种设置下的52-255个电子,在第二种设置下全部过曝,ADU值定格在了255。所以对于亮的目标,我们就无法知道它的亮度了,因为52电子和255电子一样亮。这就造成,我们的摄像头虽然极限星等很高,比如5等,但是画面中2等的恒星就开始过曝了。如果有亮流星出现,画面可能会有一大片白,对流星的坐标测量也会出问题。
+这样暗的目标确实显得更亮了,但是相机对亮暗的分辨能力却降低了。第一种设置下的 52-255 个电子,在第二种设置下全部过曝,ADU 值定格在了 255。所以对于亮的目标,我们就无法知道它的亮度了,因为 52 电子和 255 电子一样亮。这就造成,我们的摄像头虽然极限星等很高,比如 5 等,但是画面中 2 等的恒星就开始过曝了。如果有亮流星出现,画面可能会有一大片白,对流星的坐标测量也会出问题。
-这种设置的可惜之处在于,我们对画面造成了不可逆的伤害。如果有1e/ADU,1-255取值范围的数据,我们在后期想把它变亮5倍,让它与0.2e/ADU的画面一样亮,这是可以做到的——在程序里并没有最大值255的限制,想乘几都可以。但是0.2e/ADU的数据,因为相机内部有255的限制,那些52电子以上的数据就永远失去了,我们后期不管怎么做,都没法把这些信息还原出来,因为得到的画面中它们是完全一样亮的。所以,如果想要更好看的视频,完全可以把视频导入到软件中编辑,而不是一开始就把增益设置得特别高。
+这种设置的可惜之处在于,我们对画面造成了不可逆的伤害。如果有 1e/ADU,1-255 取值范围的数据,我们在后期想把它变亮 5 倍,让它与 0.2e/ADU 的画面一样亮,这是可以做到的——在程序里并没有最大值 255 的限制,想乘几都可以。但是 0.2e/ADU 的数据,因为相机内部有 255 的限制,那些 52 电子以上的数据就永远失去了,我们后期不管怎么做,都没法把这些信息还原出来,因为得到的画面中它们是完全一样亮的。所以,如果想要更好看的视频,完全可以把视频导入到软件中编辑,而不是一开始就把增益设置得特别高。


@@ -56,21 +56,21 @@
在图像处理领域,亮度、对比度的调整其实是对图像的值进行线性变换,其实就是对亮度的缩放、平移操作。
-
+
-亮度、对比度的设置与增益也类似。有的人为了画面“干净”“清晰”,把对比度拉到非常高,画面就变成了一种诡异的情况:天光背景几乎被压到0,所以也没有什么可见的噪声;然后比天光亮一点点的东西全都变成了255,恒星、流星,出现就是巅峰。这种类似二值图的视频完全没有亮度信息可言。下图是用photoshop进行的演示。
+亮度、对比度的设置与增益也类似。有的人为了画面“干净”“清晰”,把对比度拉到非常高,画面就变成了一种诡异的情况:天光背景几乎被压到 0,所以也没有什么可见的噪声;然后比天光亮一点点的东西全都变成了 255,恒星、流星,出现就是巅峰。这种类似二值图的视频完全没有亮度信息可言。下图是用 photoshop 进行的演示。

-这也带来了另一个重要的错误:天光背景变成了负值。与超过255的值类似,比0还暗的值只能输出为0。如果为了压低天光和噪声把天光设置到0以下,就会遇到另一个问题。
+这也带来了另一个重要的错误:天光背景变成了负值。与超过 255 的值类似,比 0 还暗的值只能输出为 0。如果为了压低天光和噪声把天光设置到 0 以下,就会遇到另一个问题。
-
+
-在对天体做测光的时候,都是把它的亮度与周围的天光相减。天光的亮度是测光中很重要的数据。比如测到一颗星A的亮度是50,而它周围天光的亮度是20,这样我们就知道属于这颗星的亮度是30。如果另一颗星B测到是80,那么它的亮度就是60,B星的亮度是A星的两倍。之所以能得到这个结论,是因为常见的CMOS和CCD是线性器件:在工作范围内,接受到的光子数与输出的ADU值成正比,ADU两倍就是光子数两倍。
+在对天体做测光的时候,都是把它的亮度与周围的天光相减。天光的亮度是测光中很重要的数据。比如测到一颗星 A 的亮度是 50,而它周围天光的亮度是 20,这样我们就知道属于这颗星的亮度是 30。如果另一颗星 B 测到是 80,那么它的亮度就是 60,B 星的亮度是 A 星的两倍。之所以能得到这个结论,是因为常见的 CMOS 和 CCD 是线性器件:在工作范围内,接受到的光子数与输出的 ADU 值成正比,ADU 两倍就是光子数两倍。
-但如果我们调整了亮度和对比度,把整个画面压低了30,这时候画面中的天光就都变成负值了,所以输出值是0;而A星变成了20,B星变成了50。可以看到,两颗星的比值不再是两倍了。也就是说,天光背景没了,线性就被破坏了。
+但如果我们调整了亮度和对比度,把整个画面压低了 30,这时候画面中的天光就都变成负值了,所以输出值是 0;而 A 星变成了 20,B 星变成了 50。可以看到,两颗星的比值不再是两倍了。也就是说,天光背景没了,线性就被破坏了。
-所以不要把天光背景压到小于0,等于0也不行。如果天光背景是0,那由于读出噪声的存在,很多像素值随机波动时还是会小于0而被截断成0,所以测得的天光平均值会有偏离。这就是为什么天文摄影中有个设置叫做“偏置”,通常设置成大于0,就是为了避免读出噪声被0截断。天文摄影中的叠加就是依赖器件的线性,所以偏置和偏置场的拍摄非常受重视。
+所以不要把天光背景压到小于 0,等于 0 也不行。如果天光背景是 0,那由于读出噪声的存在,很多像素值随机波动时还是会小于 0 而被截断成 0,所以测得的天光平均值会有偏离。这就是为什么天文摄影中有个设置叫做“偏置”,通常设置成大于 0,就是为了避免读出噪声被 0 截断。天文摄影中的叠加就是依赖器件的线性,所以偏置和偏置场的拍摄非常受重视。
## 总结
@@ -78,4 +78,4 @@
整篇文章下来,可以总结成一个规律:对图像的大部分处理功能都是不可逆的,这些设置越少用越好。如果为了省事,把相机的输出设置成适合肉眼观看的样子,实际可能会让图像失去科学价值。
-这里我并没有反对这些处理,只是反对把这些处理放在相机内部。我们完全可以让相机输出原始数据,在进行了测量定轨、保存了原始数据之后,再对数据进行处理,制作成美观的流星视频。在这方面天文CMOS相机有先天的优势,因为它们通过USB输出的是无压缩的原始数据,尤其是有的还支持16位原始数据,为后期带来了很大的空间。而网络摄像头输出的是码率有限的h.264视频流,暴力处理后画质会有所恶化。
+这里我并没有反对这些处理,只是反对把这些处理放在相机内部。我们完全可以让相机输出原始数据,在进行了测量定轨、保存了原始数据之后,再对数据进行处理,制作成美观的流星视频。在这方面天文 CMOS 相机有先天的优势,因为它们通过 USB 输出的是无压缩的原始数据,尤其是有的还支持 16 位原始数据,为后期带来了很大的空间。而网络摄像头输出的是码率有限的 h.264 视频流,暴力处理后画质会有所恶化。
diff --git a/docs/preface.md b/docs/preface.md
index 044a2f1..ba14ab2 100644
--- a/docs/preface.md
+++ b/docs/preface.md
@@ -6,25 +6,24 @@
这里是流星探测的技术博客,记录了在我们的流星观测中的发现和思考。
-* [前言](meteor/motivation)
-* [流星探测原理(1)](meteor/concepts)
-* [流星探测原理(2)](meteor/concepts2)
-* [世界上的流星监测网](meteor/networks)
-* [澳大利亚沙漠火流星监测网](meteor/DFN.md)
-* [光子到电子到数字](/meteor/photon_to_digit)
-* [网络摄像头的错误设置](/meteor/wrong_settings)
-* [如何拍到更多流星?](/meteor/camera)
-
+- [前言](meteor/motivation)
+- [流星探测原理(1)](meteor/concepts)
+- [流星探测原理(2)](meteor/concepts2)
+- [世界上的流星监测网](meteor/networks)
+- [澳大利亚沙漠火流星监测网](meteor/DFN.md)
+- [光子到电子到数字](/meteor/photon_to_digit)
+- [网络摄像头的错误设置](/meteor/wrong_settings)
+- [如何拍到更多流星?](/meteor/camera)
## 从零到一搭建流星监控设备
从零开始,搭建一套可以自动运行、远程管理的流星观测站。
-* [流星监测站的主要构成](hardware/howto)
-* [相机部分](hardware/camera)
-* [电脑部分](hardware/computer)
-* [支架和安装](hardware/casing)
+- [流星监测站的主要构成](hardware/howto)
+- [相机部分](hardware/camera)
+- [电脑部分](hardware/computer)
+- [支架和安装](hardware/casing)
## 网站使用说明
-在网站上管理你的设备和数据,与大家一起探究流星的奥秘
\ No newline at end of file
+在网站上管理你的设备和数据,与大家一起探究流星的奥秘