2022-10-03
This commit is contained in:
parent
a598a01f56
commit
03a48d0df2
@ -1,24 +1,34 @@
|
||||
# 流星探测原理(1)
|
||||
|
||||
常见的流星体尺寸在厘米、毫米量级,是行星际尘埃尺寸连续谱中的一部分。1米以上的小行星通过地面望远镜可以提前发现,但一米以下就很难了。尺寸在几十厘米、几厘米的流星体,只有在进入地球大气时才可以被观测到。
|
||||
|
||||

|
||||
|
||||
除了之前说的探测长周期彗星之外,流星在其他几个方面也有独特的科学价值。
|
||||
|
||||
* 研究太阳系中尘埃的尺寸、分布、演化,从而可以解答一些关于小天体、太阳系形成与演化的问题;
|
||||
* 已知轨道的陨石非常稀少,目前只有几十颗[^1],轨道和成分相互对照有很高的科学价值;
|
||||
* 流星体对空间安全也有一定的威胁,例如曾有通信卫星在英仙座流星雨期间失效,就推测与流星雨活动有关。
|
||||
|
||||
流星是一类非常独特的天文现象,对流星的观测自然也是独辟蹊径,非常迥异于其他天象。流星的观测大致可以分为射电观测和可见光观测。两个观测手段都有爱好者和专业研究人员参与。
|
||||
|
||||
## 射电观测
|
||||
|
||||
在射电波段,主要观测的是流星和余迹反射的无线电波。无线电波可以是观测者主动发射的(通常称作“流星雷达”),也可以是远处的其他发射源发射的,通常是广播电台或者其他的信标台。而靠流星余迹反射,甚至可以进行远距离通信,有其特定的应用场景。
|
||||
在射电波段,主要观测流星和余迹反射的无线电波。无线电波可以是观测者主动发射的(通常称作“流星雷达”),也可以是远处其他发射源发射的,通常是广播电台或者其他信标台。而靠流星余迹反射,甚至可以进行远距离通信,有其特定的应用场景。
|
||||
|
||||
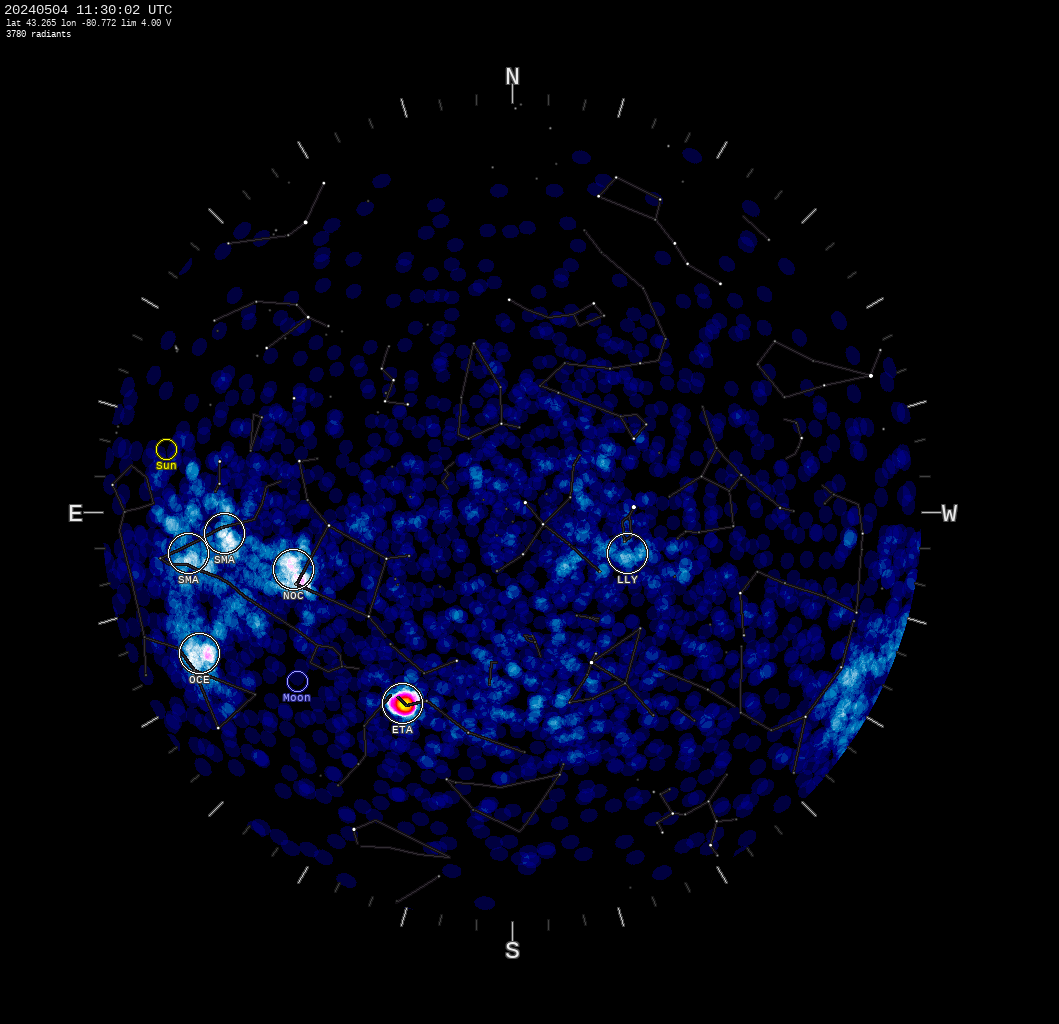
射电观测的突出优点是可以昼夜运行。很多流星群的辐射点接近太阳,只在白天升起,不可能在光学波段观测到。也就是说,这些流星雨只发生在白天。雷达观测就发现了很多这样的流星群。另外,射电波段能观测到很暗的流星。例如2012年天龙座流星雨,雷达观测到了ZHR达到9000的爆发,而可见光的观测到的流星ZHR只有200左右[^1]。
|
||||
射电观测的突出优点是可以昼夜运行。很多流星群的辐射点接近太阳,只在白天升起,不可能在光学波段观测到。也就是说,这些流星雨只发生在白天。雷达观测就发现了很多这样的流星群。另外,射电波段能观测到很暗的流星。例如2012年天龙座流星雨,雷达观测到了ZHR达到9000的爆发,而可见光观测到的流星ZHR只有200左右[^2]。
|
||||
|
||||
|
||||
|
||||
* 上图是实时的[^2]
|
||||
* 上图是实时的[^3]
|
||||
|
||||
但是,流星雷达对流星的测量不如光学观测精确。由于波长较长等原因,流星雷达只能将流星的位置精确到千米量级,而光学波段可以达到10米。而依赖广播电台的“听”流星,就完全无法测量流星的方位,只能进行计数。此外,根据一些研究[^3],射电流星和光学流星的对应关系也并不是很确切。并不是所有光学流星都有无线电回波,这可能与流星轨迹得到朝向有关系;同时,流星的亮度与雷达反射面积(RCS)有正相关的关系,但残差比较大。
|
||||
但是,流星雷达对流星的测量不如光学观测精确。由于波长较长等原因,流星雷达只能将流星的位置精确到千米量级,而光学波段可以达到10米。而依赖广播电台的“听”流星,就完全无法测量流星的方位,只能进行计数。此外,根据一些研究[^4],射电流星和光学流星的对应关系也并不是很确切。并不是所有光学流星都有无线电回波,这可能与流星轨迹的朝向有关系;同时,流星的亮度与雷达反射面积(RCS)有正相关的关系,但误差比较大。
|
||||
|
||||
因为流星雷达技术难度较大,再加上无线电法规的限制,基本没有爱好者涉足。
|
||||
|
||||
## 光学观测
|
||||
|
||||
光学观测是流星观测的重头戏。光学观测使用简单的设备就可以运行,也很容易达到比较高的精度;同时,观测到的结果也更符合人们心目中对于流星的期待,所以更受大家欢迎。因为较高的精度,使用光学观测的数据,还可以进行陨石落点预测、发现新流星群、寻找母体彗星等研究,具有很高的价值。
|
||||
光学观测是流星观测的重头戏。光学观测使用简单的设备就可以运行,也很容易达到比较高的精度;同时,观测到的结果也更符合人们心目中对于流星的期待,所以更受大家欢迎。因为较高的精度,使用光学观测数据还可以进行陨石落点预测、发现新流星群、寻找母体彗星等研究,具有很高的价值。
|
||||
|
||||
在光学观测上,流星有如下特点:
|
||||
|
||||
@ -26,11 +36,11 @@
|
||||
* **随机性**:流星是随机出现的。流星基本来自于行星际空间中的小颗粒,这些颗粒进入地球大气之无法被观测到,自然也无法预测。这就造成我们很难使用望远镜去观测流星,因为望远镜的视场太小。
|
||||
* **距离近**:流星开始发光的位置一般在离地面100km左右。相较于其他天体,流星的距离是非常非常近的。在相隔几十千米的位置观测,流星的位置都会明显不同——这就是三角视差。
|
||||
|
||||
我们对在对流星进行光学观测时主要就是围绕着三个特点。因为流星持续时间很短,为了在较短的时间内获取极可能多的数据,拍摄流星的视频是一个很自然的对策。每一帧视频都代表着流星在这个时间点上的位置,视频连起来就得到了轨迹,从中就可以得到流星的速度信息。
|
||||
我们对在对流星进行光学观测时主要就是围绕着三个特点。因为流星持续时间很短,为了在较短的时间内获取尽可能多的数据,拍摄流星的视频是一个很自然的对策。每一帧视频都代表着流星在这个时间点上的位置,视频连起来就得到了轨迹,从中就可以得到流星的速度信息。
|
||||
|
||||
因为流星出现的随机性,为了尽可能多的探测流星,我们只能增加覆盖的天区面积。所以,大部分流星相机都采用的是鱼眼或广角镜头。
|
||||
|
||||
而第三点,其实是流星光学观测的立身之本——通过三角视差,可以很方便的测量流星的三维位置。通常天文观测中,距离很远的天体是很难测距的。即使是离太阳较近的恒星,周年视差都小于1角秒,很难侧准,因此测出来的距离误差很大。对于流星来说,间隔几十公里就可以得到几十度的视差,因此我们就可以综合多个观测站测量到的流星坐标,计算出流星在三维空间中的位置,三个维度都精确到10m的量级。
|
||||
而第三点,其实是流星光学观测的立身之本——通过三角视差,可以很方便的测量流星的三维位置。通常天文观测中,距离很远的天体是很难测距的。即使是离太阳较近的恒星,周年视差都小于1角秒,很难测准,因此测出来的距离误差很大。对于流星来说,间隔几十公里就可以得到几十度的视差,因此我们就可以综合多个观测站测量到的流星坐标,计算出流星在三维空间中的位置,三个维度都精确到10m的量级。
|
||||
|
||||

|
||||
|
||||
@ -38,10 +48,12 @@
|
||||
|
||||
有的人以为确定流星位置需要3个站点的数据,其实两个站点就够了。因为单站观测可以获取两个维度(比如赤经赤纬)的数据,两个站点就有4个已知量,因此可以解出空间位置的3个未知量。
|
||||
|
||||
因此,对流星的光学观测主要方式就是:大视场、视频、多站。大视场可以确保尽可能多的拍到流星;视频观测可以获取流星的速度和光变信息;而多站观测才可以获取流星的三维轨迹。同时,观测站点越多,覆盖的范围越大,观测到的流星也就越多。这就要求我们以适当的间隔布置大量的流星相机,这是一个耗费时间精力的工作,所以爱好者在其中的参与至关重要。
|
||||
因此,流星光学观测的主要方式就是:大视场、视频、多站。大视场可以确保尽可能多的拍到流星;视频观测可以获取流星的速度和光变信息;而多站观测才可以获取流星的三维轨迹。同时,观测站点越多,覆盖的范围越大,观测到的流星也就越多。这就要求我们以适当的间隔布置大量的流星相机,这是一个耗费时间精力的工作,所以爱好者在其中的参与至关重要。
|
||||
|
||||
[^1]:[The Unexpected 2012 Draconid Meteor Storm](https://arxiv.org/abs/1311.1733)
|
||||
[^1]:[Meteorites with photographic orbits](https://www.meteoriteorbits.info/)
|
||||
|
||||
[^2]:[Radar meteor radiants](https://fireballs.ndc.nasa.gov/cmor-radiants/)
|
||||
[^2]:[The Unexpected 2012 Draconid Meteor Storm](https://arxiv.org/abs/1311.1733)
|
||||
|
||||
[^3]:[FRIPON: A worldwide network to track incoming meteoroids](https://www.aanda.org/articles/aa/full_html/2020/12/aa38649-20/aa38649-20.html)
|
||||
[^3]:[Radar meteor radiants](https://fireballs.ndc.nasa.gov/cmor-radiants/)
|
||||
|
||||
[^4]:[FRIPON: A worldwide network to track incoming meteoroids](https://www.aanda.org/articles/aa/full_html/2020/12/aa38649-20/aa38649-20.html)
|
||||
BIN
docs/meteor/image/20221003174633.png
Normal file
BIN
docs/meteor/image/20221003174633.png
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 73 KiB |
23
docs/meteor/noise.md
Normal file
23
docs/meteor/noise.md
Normal file
@ -0,0 +1,23 @@
|
||||
# 如影随形的噪声
|
||||
|
||||
电影里偶尔会出现这样的桥段:街道上的摄像头拍到一张车辆的照片,这时候大佬对着小喽啰喊,放大!增强!然后小喽啰一通操作,画面越放越大,车的车牌号、驾驶员就都变得清清楚楚了。
|
||||
|
||||
在现实中这种操作显然是不存在的,我们都知道望远镜的分辨率受口径限制,而极限星等也跟口径有关。所以,我们在拍摄流星的时候,必然会撞到这些物理定律设置的障碍。
|
||||
|
||||
不过有意思的是,本来用于安保的网络摄像头很早就提供了“降噪”功能。只要打开降噪功能,晚上的画面立刻就变得清晰了许多,本来噪声密布的夜空瞬间安静了下来,很多本来看不到的暗星也浮现了出来。但是不知道你有没有注意到这一点:拍到的流星好像并没有增多。实际上,“降噪”也并不是没有代价的。
|
||||
|
||||
关于这项功能,以及其他功能的滥用,我们会在后面的文章中逐步分析。在这之前,我们先来了解一下相机的基本原理。
|
||||
|
||||
## 测量“光子”
|
||||
|
||||
光从各种光源发出来,经过遥远的距离,再经过镜头或者人眼的折射,落在传感器或者视网膜上。我们的眼睛和摄像头的目的都是一样的:测量来自这束光的亮度。尤其是摄像头,它会把光的亮度转化成数字,而显示器把数字再转化成亮度,这我们就能在屏幕上见到摄像头拍到的画面了。所以摄像头的好坏,基本相当于他能多么准确地测量光的亮度;而任何偏离光本身亮度的测量结果,就是我们所说的噪声。有个概念就是信噪比,顾名思义,信噪比就是信号/噪声。只要尽力降低噪声,信噪比就越高,泽亮结果就越好。
|
||||
|
||||
但还有一个基本问题:对一束光的测量并不是连续的。我们知道光子的概念,光的能量是一份一份传播的,而相机传感器也是对落在上面的光子进行计数。而对光子的数量,本身就带有随机性,而随机性就会带来噪声。平时我们不会注意到这种随机性,因为白天或者灯光下光子的数量是很多的,随机性被抹掉了,而在拍摄星空时,光子的数量很少,这种效应就很明显。我们进行一点计算就会发现,对于我们用肉眼观察6等的恒星,每秒钟进入我们眼中的光子数量只有10个左右!对于跟人眼尺寸差不多的摄像头,这个数字也差不多。可见人眼还是一台很不错的相机。
|
||||
|
||||
关于“光子”为什么会带有这种天然的噪声,我们用一个日常生活中的场景来类比。我们在公交站等公交车,对于10分钟一班的车,有时候两辆车的间隔会是15分钟,有时候又是10分钟。而如果一班车我们不知道发车间隔,我们在公交车边等边算时间,用这个时间间隔来估算。
|
||||
|
||||
如果我们在公交站等了10分钟,这10分钟一共来了1辆车,那这辆车的发车间隔可能是多少?当然最佳估计就是10分钟一辆(每小时6班),但完全有可能是15分钟1辆(每小时4班,也很有可能是5分钟一辆(每小时12班)。这种时候非常你就非常拿不准这个时间间隔。
|
||||
|
||||
而如果你在站台上等了两个小时,等到了12辆车,那你说这趟车是每小时6辆的把握就大得多了。每小时8班、每小时5班的概率都大大降低。如果你等的时间更久,等了整整一天,你对发车间隔的测量就更有把握了。
|
||||
|
||||
这个例子就表明,“一个一个”随机出现的事件,对出现概率的测量是随着出现次数增加逐渐变精确的。在数学上,这就是所谓的“泊松噪声”。它的大小等于光子的平方根,比如100个光子,泊松噪声时10个光子,此时信噪比是10,而10000个光子,泊松噪声是100个光子,信噪比是100。
|
||||
Loading…
x
Reference in New Issue
Block a user